Publications
Preprints
Planning over MAPF Agent Dependencies via Multi-Dependency PIBT.
Modern Multi-Agent Path Finding (MAPF) algorithms must plan for hundreds to thousands of agents in congested environments within a second, requiring highly efficient algorithms. Priority Inheritance with Backtracking (PIBT) is a popular algorithm capable of effectively planning in such situations. However, PIBT is constrained by its rule-based planning procedure and lacks generality because it restricts its search to paths that conflict with at most one other agent. This limitation also applies to Enhanced PIBT (EPIBT), a recent extension of PIBT. In this paper, we describe a new perspective on solving MAPF by planning over agent dependencies. Taking inspiration from PIBT’s priority inheritance logic, we define the concept of agent dependencies and propose Multi-Dependency PIBT (MD-PIBT) that searches over agent dependencies. MD-PIBT is a general framework where specific parameterizations can reproduce PIBT and EPIBT. At the same time, alternative configurations yield novel planning strategies that are not expressible by PIBT or EPIBT. Our experiments demonstrate that MD-PIBT effectively plans for as many as 10,000 homogeneous agents under various kinodynamic constraints, including pebble motion, rotation motion, and differential drive robots with speed and acceleration limits. We perform thorough evaluations on different variants of MAPF and find that MD-PIBT is particularly effective in MAPF with large agents.
@misc{ Jiang2026MDPIBT,
author = "Zixiang Jiang and Yulun Zhang and Rishi Veerapaneni and Jiaoyang Li",
title = "Planning over MAPF Agent Dependencies via Multi-Dependency PIBT",
year = "2026",
eprint = "arXiv:2603.23405",
}
Optimization of Edge Directions and Weights for Mixed Guidance Graphs in Lifelong Multi-Agent Path Finding.
Multi-Agent Path Finding (MAPF) aims to move agents from their start to goal vertices on a graph. Lifelong MAPF (LMAPF) continuously assigns new goals to agents as they complete current ones. To guide agents’ movement in LMAPF, prior works have proposed Guidance Graph Optimization (GGO) methods to optimize a guidance graph, which is a bidirected weighted graph whose directed edges represent moving and waiting actions with edge weights being action costs. Higher edge weights represent higher action costs. However, edge weights only provide soft guidance. An edge with a high weight only discourages agents from using it, instead of prohibiting agents from traversing it. In this paper, we explore the need to incorporate edge directions optimization into GGO, providing strict guidance. We generalize GGO to Mixed Guidance Graph Optimization (MGGO), presenting two MGGO methods capable of optimizing both edge weights and directions. The first optimizes edge directions and edge weights in two phases separately. The second applies Quality Diversity algorithms to optimize a neural network capable of generating edge directions and weights. We also incorporate traffic patterns relevant to edge directions into a GGO method, making it capable of generating edge-direction-aware guidance graphs.
@misc{ Zhang2026MGGO,
author = "Yulun Zhang and Varun Bhatt and Matthew C. Fontaine and Stefanos Nikolaidis and Jiaoyang Li",
title = "Optimization of Edge Directions and Weights for Mixed Guidance Graphs in Lifelong Multi-Agent Path Finding",
year = "2026",
eprint = "arXiv:2602.23468",
}Lifelong Scalable Multi-Agent Realistic Testbed and A Comprehensive Study on Design Choices in Lifelong AGV Fleet Management Systems.
We present Lifelong Scalable Multi-Agent Realistic Testbed (LSMART), an open-source simulator to evaluate any Multi-Agent Path Finding (MAPF) algorithm in a Fleet Management System (FMS) with Automated Guided Vehicles (AGVs). MAPF aims to move a group of agents from their corresponding starting locations to their goals. Lifelong MAPF (LMAPF) is a variant of MAPF that continuously assigns new goals for agents to reach. LMAPF applications, such as autonomous warehouses, often require a centralized, lifelong system to coordinate the movement of a fleet of robots, typically AGVs. However, existing works on MAPF and LMAPF often assume simplified kinodynamic models, such as pebble motion, as well as perfect execution and communication for AGVs. Prior work has presented SMART, a software capable of evaluating any MAPF algorithms while considering agent kinodynamics, communication delays, and execution uncertainties. However, SMART is designed for MAPF, not LMAPF. Generalizing SMART to an FMS requires many more design choices. First, an FMS parallelizes planning and execution, raising the question of when to plan. Second, given planners with varying optimality and differing agent-model assumptions, one must decide how to plan. Third, when the planner fails to return valid solutions, the system must determine how to recover. In this paper, we first present LSMART, an open-source simulator that incorporates all these considerations to evaluate any MAPF algorithms in an FMS. We then provide experiment results based on state-of-the-art methods for each design choice, offering guidance on how to effectively design centralized lifelong AGV Fleet Management Systems. LSMART is available at this https URL.
@misc{ YanAndZhang2026LSMART,
author = "Jingtian Yan and Yulun Zhang and Zhenting Liu and Han Zhang and He Jiang and Jingkai Chen and Stephen F. Smith and Jiaoyang Li",
title = "Lifelong Scalable Multi-Agent Realistic Testbed and A Comprehensive Study on Design Choices in Lifelong AGV Fleet Management Systems",
year = "2026",
eprint = "arXiv:2602.15721",
}
Advancing MAPF towards the Real World: A Scalable Multi-Agent Realistic Testbed (SMART).
We present Scalable Multi-Agent Realistic Testbed (SMART), a realistic and efficient software tool for evaluating Multi-Agent Path Finding (MAPF) algorithms. MAPF focuses on planning collision-free paths for a group of agents. While state-of-the-art MAPF algorithms can plan paths for hundreds of robots in seconds, they often rely on simplified robot models, making their real-world performance unclear. Researchers typically lack access to hundreds of physical robots in laboratory settings to evaluate the algorithms. Meanwhile, industrial professionals who lack expertise in MAPF require an easy-to-use simulator to efficiently test and understand the performance of MAPF algorithms in their specific settings. SMART fills this gap with several advantages: (1) SMART uses a physics-engine-based simulator to create realistic simulation environments, accounting for complex real-world factors such as robot kinodynamics and execution uncertainties, (2) SMART uses an execution monitor framework based on the Action Dependency Graph, facilitating seamless integration with various MAPF algorithms and robot models, and (3) SMART scales to thousands of robots. In addition, we use SMART to explore and demonstrate research questions about the execution of MAPF algorithms in real-world scenarios.
@misc{ Yan2025SMART,
author = "Jingtian Yan and Zhifei Li and William Kang and Kevin Zheng and Yulun Zhang and Zhe Chen and Yue Zhang and Daniel Harabor and Stephen F. Smith and Jiaoyang Li",
title = "Advancing MAPF towards the Real World: A Scalable Multi-Agent Realistic Testbed (SMART)",
year = "2025",
eprint = "arXiv:2503.04798",
}2026
Conflict-Based Search as a Protocol: A Multi-Agent Motion Planning Protocol for Heterogeneous Agents, Solvers, and Independent Tasks.
Imagine the future construction site, hospital, or office with dozens of robots bought from different manufacturers. How can we enable these different robots to effectively move in a shared environment, given that each robot may have its own independent motion planning system? This work shows how we can get efficient collision-free movements between algorithmically heterogeneous agents by using Conflict-Based Search (Sharon et al. 2015) as a protocol. At its core, the CBS Protocol requires one specific single-agent motion planning API; finding a collision-free path that satisfies certain space-time constraints. Given such an API, CBS uses a central planner to find collision-free paths - independent of how the API is implemented. We demonstrate how this protocol enables multi-agent motion planning for a heterogeneous team of agents completing independent tasks with a variety of single-agent planners including: Heuristic Search (e.g., A*), Sampling Based Search (e.g., RRT), Optimization (e.g., Direct Collocation), Diffusion, and Reinforcement Learning.
@inproceedings{ VeerapaneniICRA26,
author = "Rishi Veerapaneni and Ho Kwan Alvin Tang and Yidai Cen and Haodong He and Sophia Zhao and Viraj Shah and Ziteng Ji and Gabriel Olin and Jon Arrizabalaga and Yorai Shaoul and Jiaoyang Li and Maxim Likhachev",
title = "Conflict-Based Search as a Protocol: A Multi-Agent Motion Planning Protocol for Heterogeneous Agents, Solvers, and Independent Tasks",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
pages = "",
year = "2026",
doi = "",
}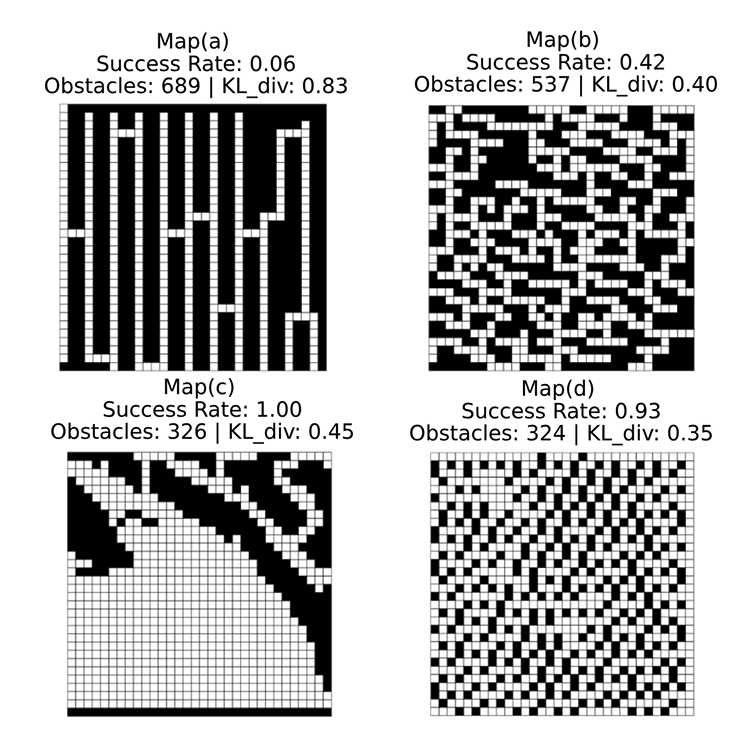
QD-MAPPER: A Quality Diversity Framework to Automatically Evaluate Multi-Agent Path Finding Algorithms in Diverse Maps.
We use the Quality Diversity (QD) algorithm with Neural Cellular Automata (NCA) to generate benchmark maps for Multi-Agent Path Finding (MAPF) algorithms. Previously, MAPF algorithms are tested using fixed, human-designed benchmark maps. However, such fixed benchmark maps have several problems. First, these maps may not cover all the potential failure scenarios for the algorithms. Second, when comparing different algorithms, fixed benchmark maps may introduce bias leading to unfair comparisons between algorithms. Third, since researchers test new algorithms on a small set of fixed benchmark maps, the design of the algorithms may overfit to the small set of maps. In this work, we take advantage of the QD algorithm to (1) generate maps with patterns to comprehensively understand the performance of MAPF algorithms, (2) be able to make fair comparisons between two MAPF algorithms, providing further information on the selection between two algorithms and on the design of the algorithms. Empirically, we employ this technique to generate diverse benchmark maps to evaluate and compare the behavior of different types of MAPF algorithms, including search-based, priority-based, rule-based, and learning-based algorithms. Through both single-algorithm experiments and comparisons between algorithms, we identify patterns where each algorithm excels and detect disparities in runtime or success rates between different algorithms.
@inproceedings{ QianAAMAS26,
author = "Cheng Qian and Yulun Zhang and Varun Bhatt and Matthew C. Fontaine and Stefanos Nikolaidis and Jiaoyang Li",
title = "QD-MAPPER: A Quality Diversity Framework to Automatically Evaluate Multi-Agent Path Finding Algorithms in Diverse Maps",
booktitle = "Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS)",
pages = "",
year = "2026",
doi = "",
}BTPG-max: Achieving Local Maximal Bidirectional Pairs for Bidirectional Temporal Plan Graphs. (Oral)
Multi-Agent Path Finding (MAPF) requires computing collision-free paths for multiple agents in a shared environment. Most MAPF planners assume that each agent reaches a specific location at a specific timestep, but this is infeasible to directly follow on real systems where delays often occur. To address collisions caused by agents deviating due to delays, the Temporal Plan Graph (TPG) was proposed, which converts a MAPF time-dependent solution into a timeindependent solution with a set of inter-agent dependencies. Recently, a Bidirectional TPG (BTPG) was proposed which relaxed some dependencies into “bidirectional pairs” and improved efficiency of agents executing their MAPF solution with delays. Our work improves upon this prior work by designing an algorithm, BPTG-max, that finds more bidirectional pairs. Our main theoretical contribution is in designing the BTPG-max algorithm that is locally maximal, i.e., it constructs a BTPG where no additional bidirectional pairs can be added. We also show how, in practice, BTPG-max leads to BTPGs with significantly more bidirectional edges, superior anytime behavior, and improved robustness to delays.
@inproceedings{ SuAAAI26,
author = "Yifan Su and Rishi Veerapaneni and Jiaoyang Li",
title = "BTPG-max: Achieving Local Maximal Bidirectional Pairs for Bidirectional Temporal Plan Graphs",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "29687-29695",
year = "2026",
doi = "10.1609/aaai.v40i35.40213",
}Dynamic Agent Grouping ECBS: Scaling Windowed Multi-Agent Path Finding with Completeness Guarantees. (Oral)
Multi-Agent Path Finding (MAPF) is the problem of finding a set of collision-free paths for a team of agents. Although several MAPF methods that solve full-horizon MAPF have completeness guarantees, very few MAPF methods that plan partial paths have completeness guarantees. Recent work introduced the Windowed Complete MAPF (WinC-MAPF) framework, which shows how windowed optimal MAPF solvers (e.g., SS-CBS) can use heuristic updates and disjoint agent groups to maintain completeness even when planning partial paths. A core limitation of WinC-MAPF is that it requires optimal MAPF solvers. Our main contribution is to extend WinC-MAPF by showing how we can use a bounded suboptimal solver while maintaining completeness. In particular, we design Dynamic Agent Grouping ECBS (DAG-ECBS) which dynamically creates and plans agent groups while maintaining that each agent group solution is bounded suboptimal. We prove how DAG-ECBS can maintain completeness in the WinC-MAPF framework and can improve scalability compared to windowed ECBS which does not have completeness guarantees. More broadly, our work serves as a blueprint for designing more MAPF methods that can use the WinC-MAPF framework.
@inproceedings{ ZhangAAAI26,
author = "Tiannan Zhang and Rishi Veerapaneni and Shao-Hung Chan and Jiaoyang Li and Maxim Likhachev",
title = "Dynamic Agent Grouping ECBS: Scaling Windowed Multi-Agent Path Finding with Completeness Guarantees",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "29911-29920",
year = "2026",
doi = "10.1609/aaai.v40i35.40238",
}2025
Destination-to-Chutes Task Mapping Optimization for Multi-Robot Coordination in Robotic Sorting Systems.
We study optimizing a destination-to-chutes task mapping to improve throughput in Robotic Sorting Systems (RSS), where a team of robots sort packages on a sortation floor by transporting them from induct workstations to eject chutes based on their shipping destinations (e.g. Los Angeles or Pittsburgh). The destination-to-chutes task mapping is used to determine which chutes a robot can drop its package. Finding a high-quality task mapping is challenging because of the complexity of a real-world RSS. First, optimizing task mapping is interdependent with robot target assignment and path planning. Second, chutes will be CLOSED for a period of time once they receive sufficient packages to allow for downstream processing. Third, task mapping quality directly impacts the downstream processing, as scattered chutes for the same destination increase package handling time. In this paper, we first formally define task mappings and the problem of Task Mapping Optimization (TMO). We then present a simulator of RSS to evaluate task mappings. We then present a simple TMO method based on the Evolutionary Algorithm and Mixed Integer Linear Programming, demonstrating the advantage of our optimized task mappings over the greedily generated ones in various RSS setups with different map sizes, numbers of chutes, and destinations. Finally, we use Quality Diversity algorithms to analyze the throughput of a diverse set of task mappings.
@inproceedings{ ZhangMRS25,
author = "Yulun Zhang and Alexandre O. G. Barbosa and Federico Pecora and Jiaoyang Li",
title = "Destination-to-Chutes Task Mapping Optimization for Multi-Robot Coordination in Robotic Sorting Systems",
booktitle = "Proceedings of the International Symposium on Multi-Robot and Multi-Agent Systems (MRS)",
pages = "",
year = "2025",
doi = "10.1109/MRS66243.2025.11357255",
}
Benchmarking Shortcutting Techniques for Multi-Robot-Arm Motion Planning.
Generating high-quality motion plans for multiple robot arms is challenging due to the high dimensionality of the system and the potential for inter-arm collisions. Traditional motion planning methods often produce motions that are suboptimal in terms of smoothness and execution time for multi-arm systems. Post-processing via shortcutting is a common approach to improve motion quality for efficient and smooth execution. However, in multi-arm scenarios, optimizing one arm’s motion must not introduce collisions with other arms. Although existing multi-arm planning works often use some form of shortcutting techniques, their exact methodology and impact on performance are often vaguely described. In this work, we present a comprehensive study quantitatively comparing existing shortcutting methods for multi-arm trajectories across diverse simulated scenarios. We carefully analyze the pros and cons of each shortcutting method and propose two simple strategies for combining these methods to achieve the best performance-runtime tradeoff. Video, code, and dataset are available at https://philip-huang.github.io/mr-shortcut/
@inproceedings{ HuangIROS25,
author = "Philip Huang and Yorai Shaoul and Jiaoyang Li",
title = "Benchmarking Shortcutting Techniques for Multi-Robot-Arm Motion Planning",
booktitle = "Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
pages = "13258-13265",
year = "2025",
doi = "10.1109/IROS60139.2025.11246427",
}Accelerating Focal Search in Multi-Agent Path Finding with Tighter Lower Bounds.
Multi-Agent Path Finding (MAPF) involves finding collision-free paths for multiple agents while minimizing a cost function—an NP-hard problem. Bounded suboptimal methods like Enhanced Conflict-Based Search (ECBS) and Explicit Estimation CBS (EECBS) balance solution quality with computational efficiency using focal search mechanisms. While effective, traditional focal search faces a limitation: the lower bound (LB) value determining which nodes enter the FOCAL list often increases slowly in early search stages, resulting in a constrained search space that delays finding valid solutions. In this paper, we propose a novel bounded suboptimal algorithm, double-ECBS (DECBS), to address this issue by first determining the maximum LB value and then employing a best-first search guided by this LB to find a collision-free path. Experimental results demonstrate that DECBS outperforms ECBS in most test cases and is compatible with existing optimization techniques. DECBS can reduce nearly 30% high-level Constraint Tree (CT) nodes and 50% low-level focal search nodes. When agent density is moderate to high, DECBS achieves a 23.5% average runtime improvement over ECBS with identical suboptimality bounds and optimizations.
@inproceedings{ TangIROS25decbs,
author = "Yimin Tang and Zhenghong Yu and Jiaoyang Li and Sven Koenig",
title = "Accelerating Focal Search in Multi-Agent Path Finding with Tighter Lower Bounds",
booktitle = "Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
pages = "14111-14117",
year = "2025",
doi = "10.1109/IROS60139.2025.11246148",
}RAILGUN: A Unified Convolutional Policy for Multi-Agent Path Finding across Different Environments and Tasks.
Multi-Agent Path Finding (MAPF), which focuses on finding collision-free paths for multiple robots, is crucial for applications ranging from aerial swarms to warehouse automation. Solving MAPF is NP-hard so learning-based approaches for MAPF have gained attention, particularly those leveraging deep neural networks. Nonetheless, despite the community’s continued efforts, all learning-based MAPF planners still rely on decentralized planning due to variability in the number of agents and map sizes. We have developed the first centralized learning-based policy for MAPF problem called RAILGUN. RAILGUN is not an agent-based policy but a map-based policy. By leveraging a CNN-based architecture, RAILGUN can generalize across different maps and handle any number of agents. We collect trajectories from rule-based methods to train our model in a supervised way. In experiments, RAILGUN outperforms most baseline methods and demonstrates great zero-shot generalization capabilities on various tasks, maps and agent numbers that were not seen in the training dataset.
@inproceedings{ TangIROS25railgun,
author = "Yimin Tang and Xiao Xiong and Jingyi Xi and Jiaoyang Li and Erdem Bıyık and Sven Koenig",
title = "RAILGUN: A Unified Convolutional Policy for Multi-Agent Path Finding across Different Environments and Tasks",
booktitle = "Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
pages = "8645-8651",
year = "2025",
doi = "10.1109/IROS60139.2025.11247527",
}Reevaluation of Large Neighborhood Search for MAPF: Findings and Opportunities.
Multi-Agent Path Finding (MAPF) aims to arrange collision-free goal-reaching paths for a group of agents. Anytime MAPF solvers based on large neighborhood search (LNS) have gained prominence recently due to their flexibility and scalability, leading to a surge of methods, especially those leveraging machine learning, to enhance neighborhood selection. However, several pitfalls exist and hinder a comprehensive evaluation of these new methods, which mainly include: 1) Lower than actual or incorrect baseline performance; 2) Lack of a unified evaluation setting and criterion; 3) Lack of a codebase or executable model for supervised learning methods. To address these challenges, we introduce a unified evaluation framework, implement prior methods, and conduct an extensive comparison of prominent methods. Our evaluation reveals that rule-based heuristics serve as strong baselines, while current learning-based methods show no clear advantage on time efficiency or improvement capacity. Our extensive analysis also opens up new research opportunities for improving MAPF-LNS, such as targeting high-delayed agents, applying contextual algorithms, optimizing replan order and neighborhood size, where machine learning can potentially be integrated.
@inproceedings{ TanSoCS25,
author = "Jiaqi Tan and Yudong Luo and Jiaoyang Li and Hang Ma",
title = "Reevaluation of Large Neighborhood Search for MAPF: Findings and Opportunities",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "212-220",
year = "2025",
doi = "10.1609/socs.v18i1.35996",
}Real-Time LaCAM for Real-Time MAPF.
The vast majority of Multi-Agent Path Finding (MAPF) methods with completeness guarantees require planning full-horizon paths. However, planning full-horizon paths can take too long and be impractical in real-world applications. Instead, real-time planning and execution, which only allows the planner a finite amount of time before executing and replanning, is more practical for real-world multi-agent systems. Several methods utilize real-time planning schemes but none are provably complete, which leads to livelock or deadlock. Our main contribution is Real-Time LaCAM, the first Real-Time MAPF method with provable completeness guarantees. We do this by leveraging LaCAM in an incremental fashion. Our results show how we can iteratively plan for congested environments with a cutoff time of milliseconds while still maintaining the same success rate as full-horizon LaCAM. We also show how it can be used with a single-step learned MAPF policy.
@inproceedings{ LiangSoCS25,
author = "Runzhe Liang and Rishi Veerapaneni and Daniel Harabor and Jiaoyang Li and Maxim Likhachev",
title = "Real-Time LaCAM for Real-Time MAPF",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "196-200",
year = "2025",
doi = "10.1609/socs.v18i1.35993",
}New Mechanisms in Flex Distribution for Bounded Suboptimal Multi-Agent Path Finding.
Multi-Agent Path Finding (MAPF) is the problem of finding a set of collision-free paths, one for each agent in a shared environment. Its objective is to minimize the sum of path costs (SOC), where the path cost of each agent is defined as the travel time from its start location to its target location. Explicit Estimation Conflict-Based Search (EECBS) is the leading algorithm for bounded-suboptimal MAPF, with the SOC of the solution being at most a user-specified factor w away from optimal. EECBS maintains sets of paths and a lower bound LB on the optimal SOC. Then, it iteratively selects a set of paths whose SOC is at most w times LB and introduces constraints to resolve collisions. For each path in a set, EECBS maintains a lower bound on its optimal path that satisfies constraints. By finding a path with cost at most its threshold, defined as w times its lower bound, EECBS guarantees to find a bounded-suboptimal solution. To speed up EECBS, previous work uses flex distribution to relax the requirement that each path needs to be at most its threshold. Though EECBS with flex distribution guarantees to find a bounded-suboptimal solution, increasing the thresholds may increase the SOC beyond w times LB, forcing EECBS to switch among different sets of paths (whose SOC are still at most w times LB), and thus reducing efficiency. To address this issue, we propose Conflict-Based Flex Distribution that distributes flex in proportion to the number of collisions. We also estimate the extra travel time (i.e., delays) needed to satisfy constraints and propose Delay-Based Flex Distribution. On top of that, we propose Mixed-Strategy Flex Distribution, combining both in a hierarchical framework. We prove that EECBS with our new flex distribution mechanisms is complete and bounded-suboptimal. The experiments show that our approaches outperform the original (greedy) flex distribution. Also, we redesign Focal-A* search from the previous work to improve LB for a congested environment.
@inproceedings{ ChanSoCS25,
author = "Shao-Hung Chan and Thomy Phan and Jiaoyang Li and Sven Koenig",
title = "New Mechanisms in Flex Distribution for Bounded Suboptimal Multi-Agent Path Finding",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "47-55",
year = "2025",
doi = "10.1609/socs.v18i1.35975",
}
APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly.
Compared to a single-robot workstation, a multi-robot system offers several advantages: 1) it expands the system’s workspace, 2) improves task efficiency, and, more importantly, 3) enables robots to achieve significantly more complex and dexterous tasks, such as cooperative assembly. However, coordinating the tasks and motions of multiple robots is challenging due to issues, e.g., system uncertainty, task efficiency, algorithm scalability, and safety concerns. To address these challenges, this paper studies multi-robot coordination and proposes APEX-MR, an asynchronous planning and execution framework designed to safely and efficiently coordinate multiple robots to achieve cooperative assembly, e.g., LEGO assembly. In particular, APEX-MR provides a systematic approach to post-process multi-robot tasks and motion plans to enable robust asynchronous execution under uncertainty. Experimental results demonstrate that APEX-MR can significantly speed up the execution time of many long-horizon LEGO assembly tasks by 48% compared to sequential planning and 36% compared to synchronous planning on average. To further demonstrate performance, we deploy APEX-MR in a dual-arm system to perform physical LEGO assembly. To our knowledge, this is the first robotic system capable of performing customized LEGO assembly using commercial LEGO bricks. The experimental results demonstrate that the dual-arm system, with APEX-MR, can safely coordinate robot motions, efficiently collaborate, and construct complex LEGO structures.
@inproceedings{ HuangRSS25,
author = "Philip Huang and Ruixuan Liu and Shobhit Aggarwal and Changliu Liu and Jiaoyang Li",
title = "APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly",
booktitle = "Proceedings of the Robotics: Science and Systems (RSS)",
pages = "",
year = "2025",
doi = "10.15607/RSS.2025.XXI.098",
}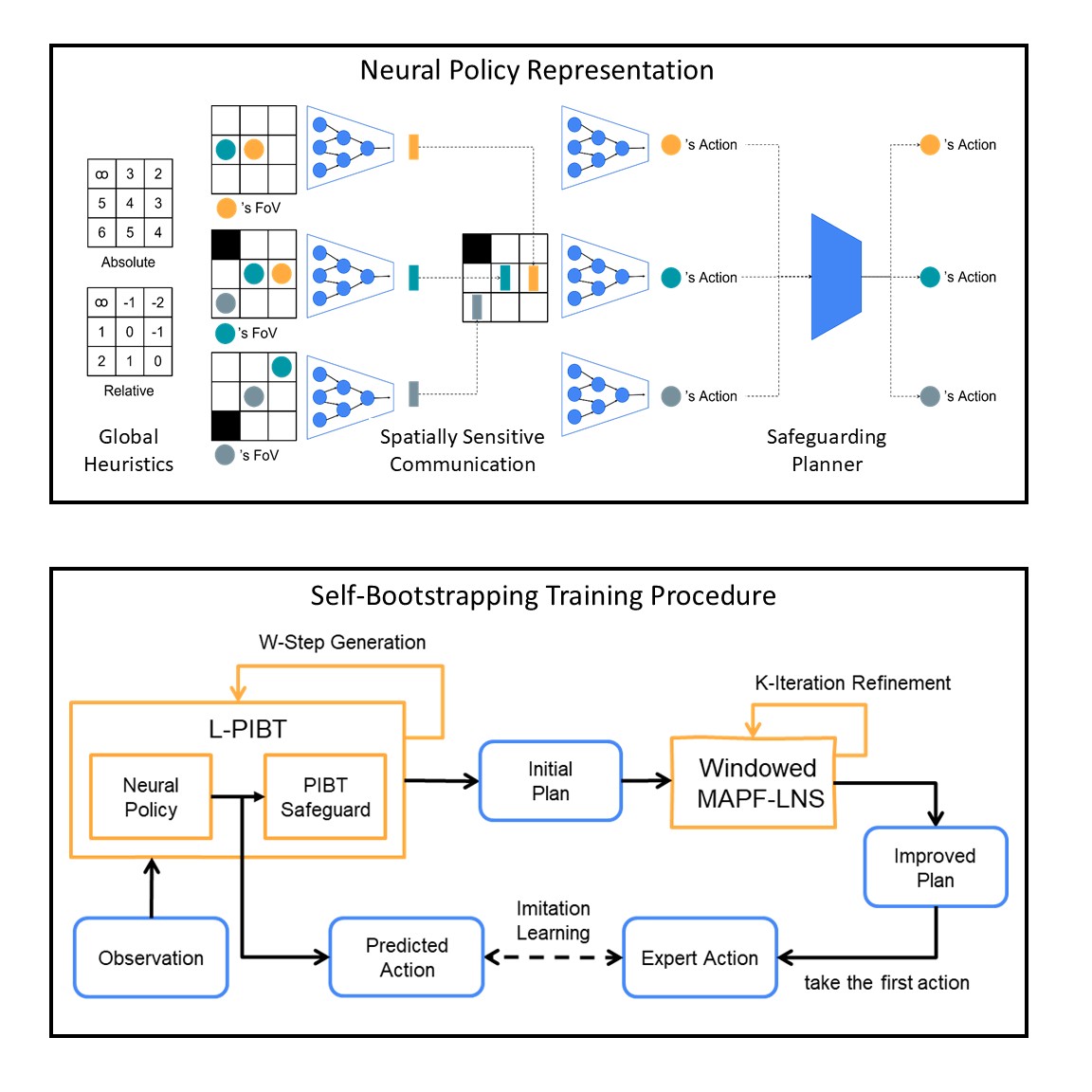
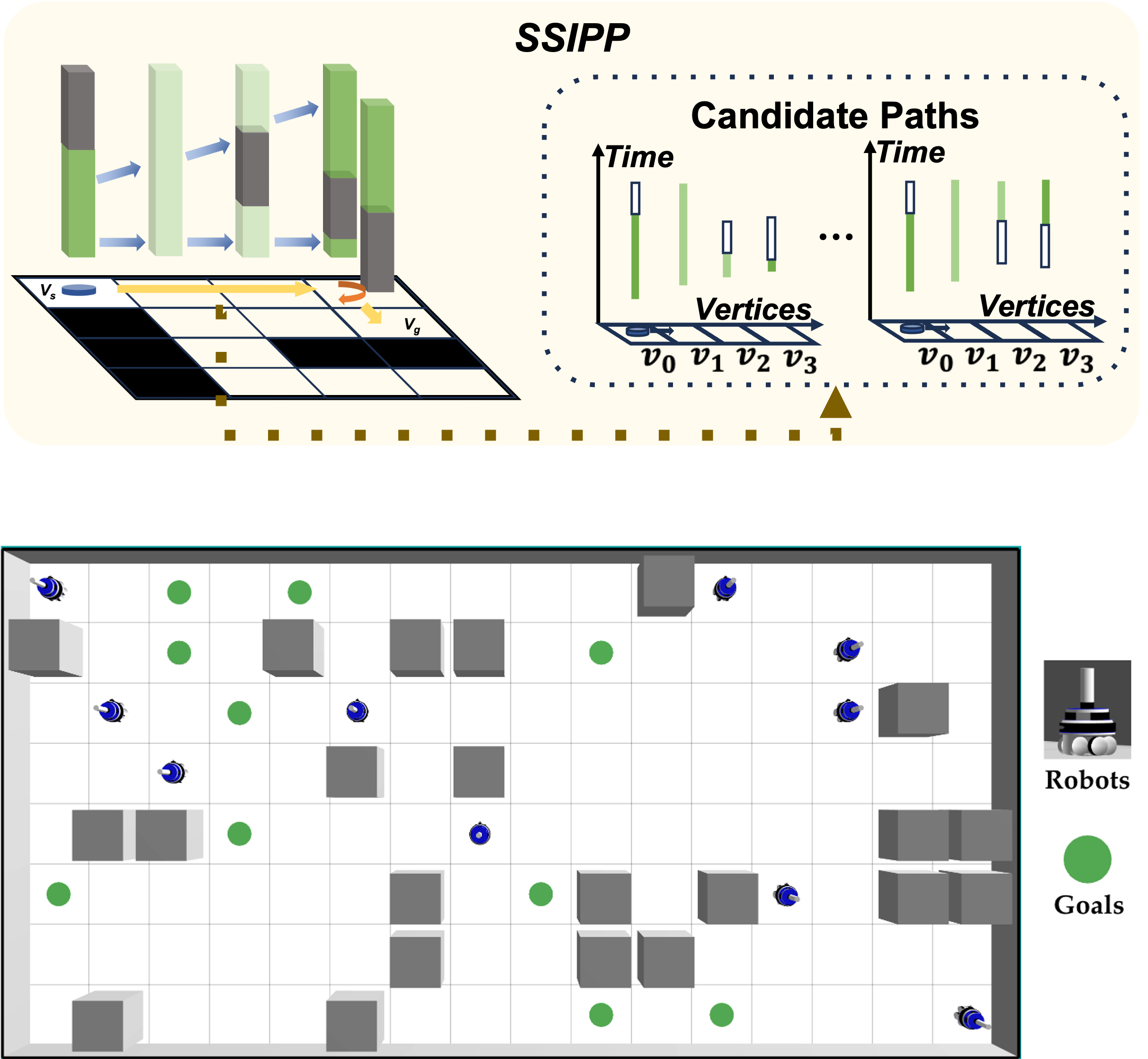
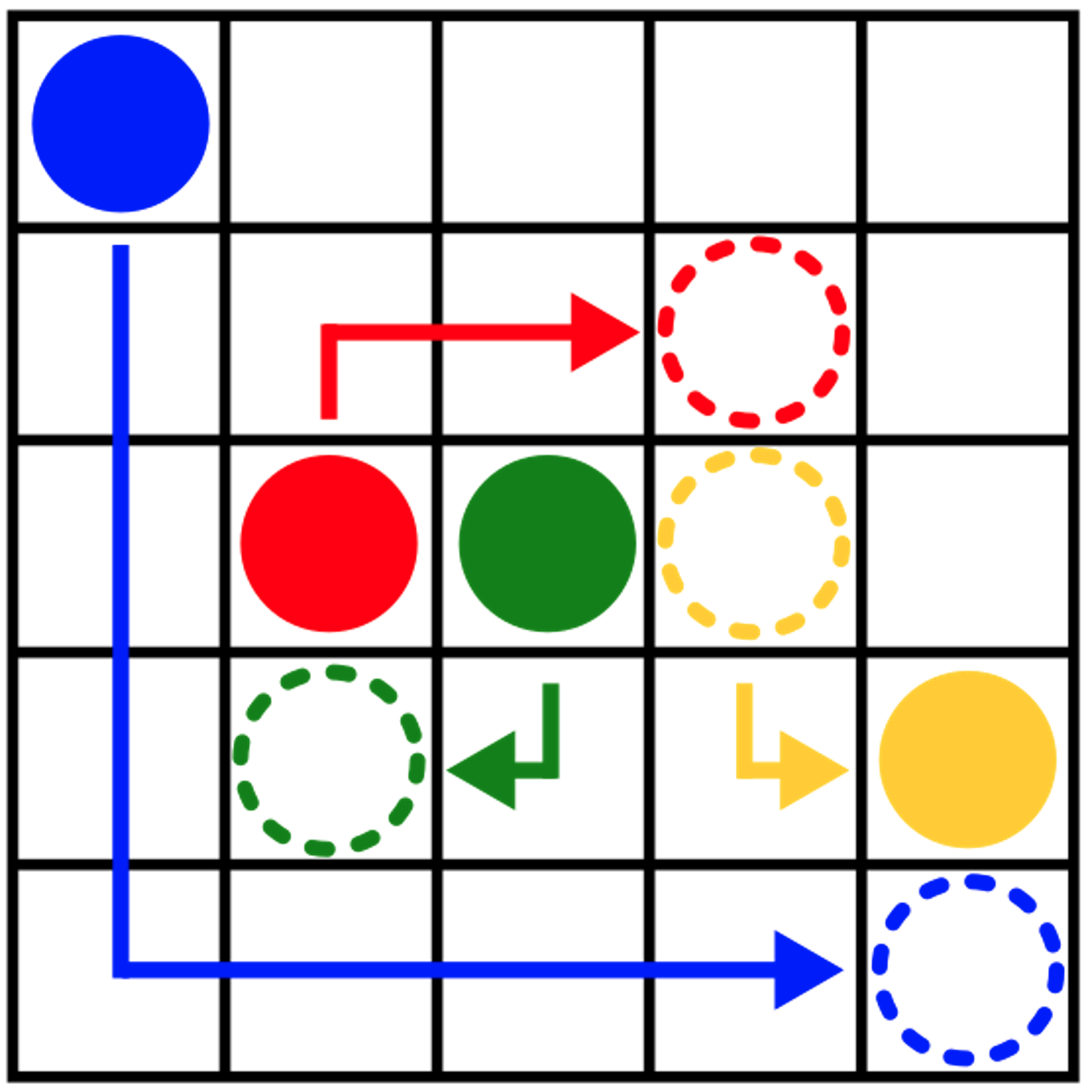
Deploying Ten Thousand Robots: Scalable Imitation Learning for Lifelong Multi-Agent Path Finding. (Best Paper on Multi-Robot Systems; Best Student Paper)
Lifelong Multi-Agent Path Finding (LMAPF) repeatedly finds collision-free paths for multiple agents that are continually assigned new goals when they reach current ones. Recently, this field has embraced learning-based methods, which reactively generate single-step actions based on individual local observations. However, it is still challenging for them to match the performance of the best search-based algorithms, especially in large-scale settings. This work proposes an imitation-learning-based LMAPF solver that introduces a novel communication module as well as systematic single-step collision resolution and global guidance techniques. Our proposed solver, Scalable Imitation Learning for LMAPF (SILLM), inherits the fast reasoning speed of learning-based methods and the high solution quality of search-based methods with the help of modern GPUs. Across six large-scale maps with up to 10,000 agents and varying obstacle structures, SILLM surpasses the best learning- and search-based baselines, achieving average throughput improvements of 137.7% and 16.0%, respectively. Furthermore, SILLM also beats the winning solution of the 2023 League of Robot Runners, an international LMAPF competition. Finally, we validated SILLM with 10 real robots and 100 virtual robots in a mock warehouse environment.
@inproceedings{ JiangICRA25,
author = "He Jiang and Yutong Wang and Rishi Veerapaneni and Tanishq Harish Duhan and Guillaume Adrien Sartoretti and Jiaoyang Li",
title = "Deploying Ten Thousand Robots: Scalable Imitation Learning for Lifelong Multi-Agent Path Finding",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
pages = "7342-7348",
year = "2025",
doi = "10.1109/ICRA55743.2025.11127445",
}Work Smarter Not Harder: Simple Imitation Learning with CS-PIBT Outperforms Large Scale Imitation Learning for MAPF.
@inproceedings{ VeerapaneniICRA25,
author = "Rishi Veerapaneni and Arthur Jakobsson and Kevin Ren and Samuel Kim and Jiaoyang Li and Maxim Likhachev",
title = "Work Smarter Not Harder: Simple Imitation Learning with CS-PIBT Outperforms Large Scale Imitation Learning for MAPF",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
pages = "10229-10236",
year = "2025",
doi = "10.1109/ICRA55743.2025.11128836",
}
Multi-Robot Motion Planning with Diffusion Models. (Spotlight)
Diffusion models have recently been successfully applied to a wide range of robotics applications for learning complex multi-modal behaviors from data. However, prior works have mostly been confined to single-robot and small-scale environments due to the high sample complexity of learning multi-robot diffusion models. In this paper, we propose a method for generating collision-free multi-robot trajectories that conform to underlying data distributions while using only single-robot data. Our algorithm, Multi-robot Multi-model planning Diffusion (MMD), does so by combining learned diffusion models with classical search-based techniques – generating data-driven motions under collision constraints. Scaling further, we show how to compose multiple diffusion models to plan in large environments where a single diffusion model fails to generalize well. We demonstrate the effectiveness of our approach in planning for dozens of robots in a variety of simulated scenarios motivated by logistics environments. View video demonstrations in our supplementary material, and our code at: github.com/yoraish/mmd.
@inproceedings{ ShaoulICLR25,
author = "Yorai Shaoul and Itamar Mishani and Shivam Vats and Jiaoyang Li and Maxim Likhachev",
title = "Multi-Robot Motion Planning with Diffusion Models",
booktitle = "Proceedings of the International Conference on Learning Representations (ICLR)",
pages = "",
year = "2025",
doi = "",
}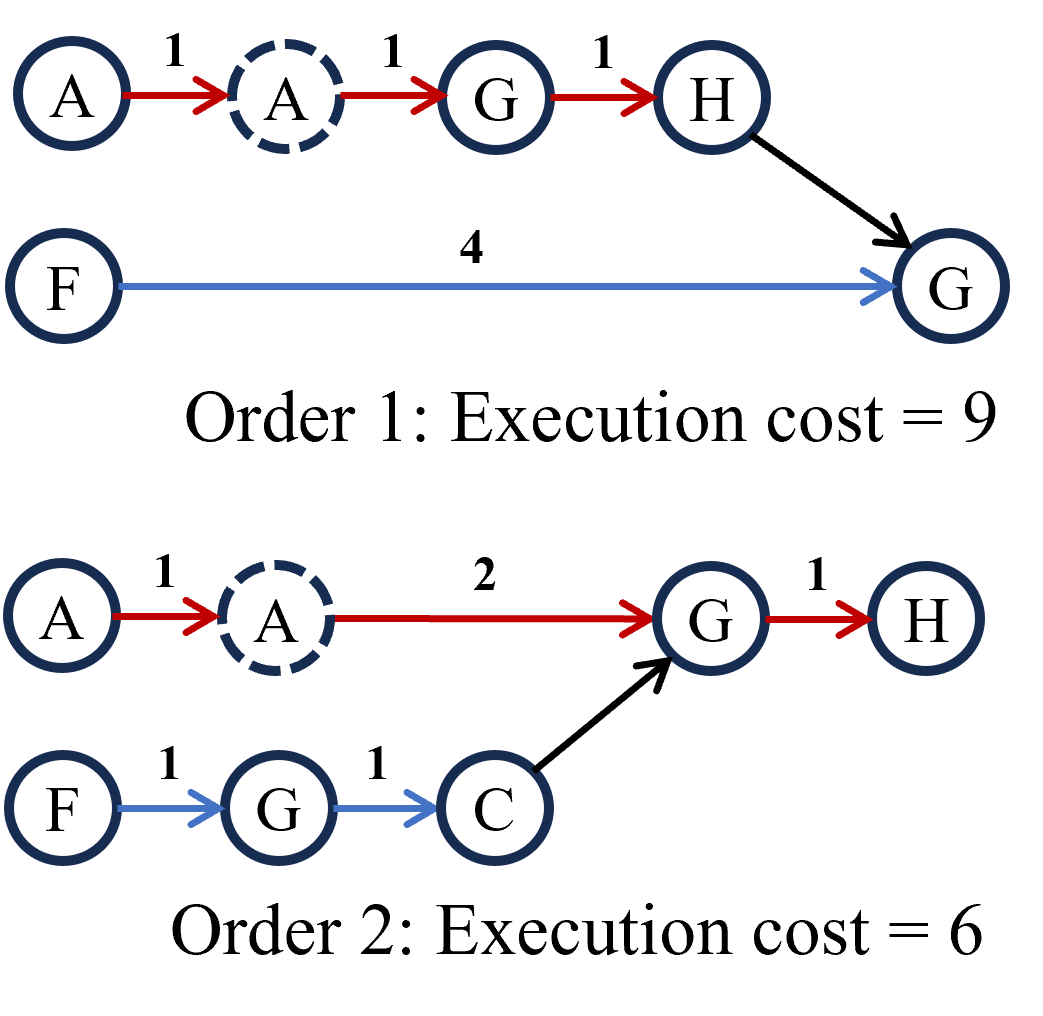
Speedup Techniques for Switchable Temporal Plan Graph Optimization. (Oral)
Multi-Agent Path Finding (MAPF) focuses on planning collision-free paths for multiple agents. However, during the execution of a MAPF plan, agents may encounter unexpected delays, which can lead to inefficiencies, deadlocks, or even collisions. To address these issues, the Switchable Temporal Plan Graph provides a framework for finding an acyclic Temporal Plan Graph with the minimum execution cost under delays, ensuring deadlock- and collision-free execution. Unfortunately, existing optimal algorithms, such as Mixed Integer Linear Programming and Graph-Based Switchable Edge Search (GSES), are often too slow for practical use. This paper introduces Improved GSES, which significantly accelerates GSES through four speedup techniques: stronger admissible heuristics, edge grouping, prioritized branching, and incremental implementation. Experiments conducted on four different map types with varying numbers of agents demonstrate that Improved GSES consistently achieves over twice the success rate of GSES and delivers up to a 30-fold speedup on instances where both methods successfully find solutions.
@inproceedings{ JiangAAAI25,
author = "He Jiang and Muhan Lin and Jiaoyang Li",
title = "Speedup Techniques for Switchable Temporal Plan Graph Optimization",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23212-23221",
year = "2025",
doi = "10.1609/aaai.v39i22.34487",
}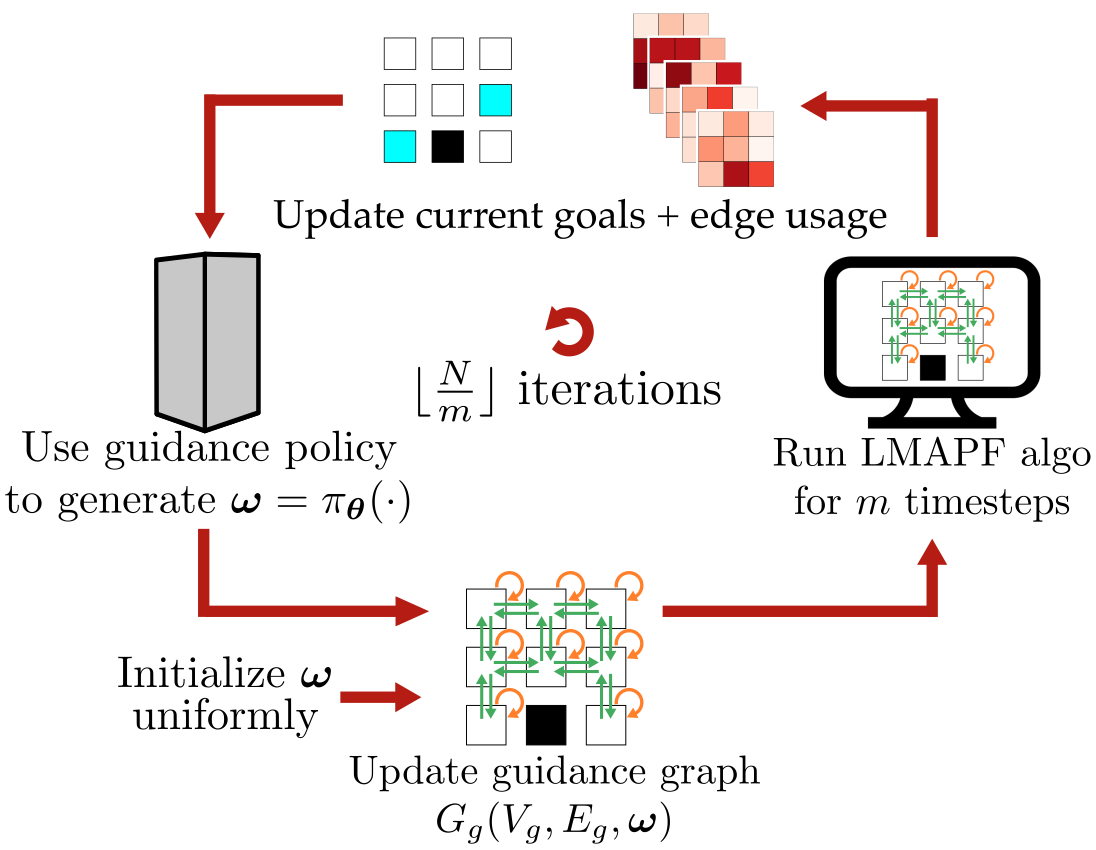
Online Guidance Graph Optimization for Lifelong Multi-Agent Path Finding.
We study the problem of optimizing a guidance policy capable of dynamically guiding the agents for lifelong Multi-Agent Path Finding based on real-time traffic patterns. Multi-Agent Path Finding (MAPF) focuses on moving multiple agents from their starts to goals without collisions. Its lifelong variant, LMAPF, continuously assigns new goals to agents. In this work, we focus on improving the solution quality of PIBT, a state-of-the-art rule-based LMAPF algorithm, by optimizing a policy to generate adaptive guidance. We design two pipelines to incorporate guidance in PIBT in two different ways. We demonstrate the superiority of the optimized policy over both static guidance and human-designed policies. Additionally, we explore scenarios where task distribution changes over time, a challenging yet common situation in real-world applications that is rarely explored in the literature.
@inproceedings{ ZangAAAI25,
author = "Hongzhi Zang and Yulun Zhang and He Jiang and Zhe Chen and Daniel Harabor and Peter J. Stuckey and Jiaoyang Li",
title = "Online Guidance Graph Optimization for Lifelong Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "14726-14735",
year = "2025",
doi = "10.1609/aaai.v39i14.33614",
}
Multi-agent Motion Planning for Differential Drive Robots Through Stationary State Search.
Multi-Agent Motion Planning (MAMP) finds various applications in fields such as traffic management, airport operations, and warehouse automation. In many of these environments, differential drive robots are commonly used. These robots have a kinodynamic model that allows only in-place rotation and movement along their current orientation, subject to speed and acceleration limits. However, existing Multi-Agent Path Finding (MAPF)-based methods often use simplified models for robot kinodynamics, which limits their practicality and realism. In this paper, we introduce a three-level framework called MASS to address these challenges. MASS combines MAPF-based methods with our proposed stationary state search planner to generate high-quality kinodynamically-feasible plans. We further extend MASS using an adaptive window mechanism to address the lifelong MAMP problem. Empirically, we tested our methods on the single-shot grid map domain and the lifelong warehouse domain. Our method shows up to 400% improvements in terms of throughput compared to existing methods.
@inproceedings{ YanAAAI25,
author = "Jingtian Yan and Jiaoyang Li",
title = "Multi-agent Motion Planning for Differential Drive Robots Through Stationary State Search",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23360-23368",
year = "2025",
doi = "10.1609/aaai.v39i22.34503",
}Windowed MAPF with Completeness Guarantees.
@inproceedings{ VeerapaneniAAAI25,
author = "Rishi Veerapaneni and Muhammad Suhail Saleem and Jiaoyang Li and Maxim Likhachev",
title = "Windowed MAPF with Completeness Guarantees",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23323-23332",
year = "2025",
doi = "10.1609/aaai.v39i22.34499",
}LNS2+RL: Combining Multi-agent Reinforcement Learning with Large Neighborhood Search in Multi-agent Path Finding. (Oral)
@inproceedings{ WangAAAI25,
author = "Yutong Wang and Tanishq Duhan and Jiaoyang Li and Guillaume Adrien Sartoretti",
title = "LNS2+RL: Combining Multi-agent Reinforcement Learning with Large Neighborhood Search in Multi-agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23343-23350",
year = "2025",
doi = "10.1609/aaai.v39i22.34501",
}2024
Guidance Graph Optimization for Lifelong Multi-Agent Path Finding.
We study how to use guidance to improve the throughput of lifelong Multi-Agent Path Finding (MAPF). Previous studies have demonstrated that, while incorporating guidance, such as highways, can accelerate MAPF algorithms, this often results in a trade-off with solution quality. In addition, how to generate good guidance automatically remains largely unexplored, with current methods falling short of surpassing manually designed ones. In this work, we introduce the guidance graph as a versatile representation of guidance for lifelong MAPF, framing Guidance Graph Optimization as the task of optimizing its edge weights. We present two GGO algorithms to automatically generate guidance for arbitrary lifelong MAPF algorithms and maps. The first method directly optimizes edge weights, while the second method optimizes an update model capable of generating edge weights. Empirically, we show that (1) our guidance graphs improve the throughput of three representative lifelong MAPF algorithms in eight benchmark maps, and (2) our update model can generate guidance graphs for as large as $93 \times 91$ maps and as many as 3,000 agents.
@inproceedings{ ZhangIJCAI24,
author = "Yulun Zhang and He Jiang and Varun Bhatt and Stefanos Nikolaidis and Jiaoyang Li",
title = "Guidance Graph Optimization for Lifelong Multi-Agent Path Finding",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "311-320",
year = "2024",
doi = "10.24963/ijcai.2024/35",
}
Scalable Mechanism Design for Multi-Agent Path Finding.
Multi-Agent Path Finding (MAPF) involves determining paths for multiple agents to travel simultaneously through a shared area toward particular goal locations. This problem is computationally complex, especially when dealing with large numbers of agents, as is common in realistic applications like autonomous vehicle coordination. Finding an optimal solution is often computationally infeasible, making the use of approximate algorithms essential. Adding to the complexity, agents might act in a self-interested and strategic way, possibly misrepresenting their goals to the MAPF algorithm if it benefits them. Although the field of mechanism design offers tools to align incentives, using these tools without careful consideration can fail when only having access to approximately optimal outcomes. Since approximations are crucial for scalable MAPF algorithms, this poses a significant challenge. In this work, we introduce the problem of scalable mechanism design for MAPF and propose three strategyproof mechanisms, two of which even use approximate MAPF algorithms. We test our mechanisms on realistic MAPF domains with problem sizes ranging from dozens to hundreds of agents. Our findings indicate that they improve welfare beyond a simple baseline.
@inproceedings{ FriedrichIJCAI24,
author = "Paul Friedrich and Yulun Zhang and Michael Curry and Ludwig Dierks and Stephen McAleer and Jiaoyang Li and Tuomas Sandholm and Sven Seuken",
title = "Scalable Mechanism Design for Multi-Agent Path Finding",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "58-66",
year = "2024",
doi = "10.24963/ijcai.2024/7",
}
Scaling Lifelong Multi-Agent Path Finding to More Realistic Settings: Research Challenges and Opportunities. (Winner of 2023 League of Robot Runners)
Multi-Agent Path Finding (MAPF) is the problem of moving multiple agents from starts to goals without collisions. Lifelong MAPF (LMAPF) extends MAPF by continuously assigning new goals to agents. We present our winning approach to the 2023 League of Robot Runners LMAPF competition, which leads us to several interesting research challenges and future directions. In this paper, we outline three main research challenges. The first challenge is to search for high-quality LMAPF solutions within a limited planning time (e.g., 1s per step) for a large number of agents (e.g., 10,000) or extremely high agent density (e.g., 97.7%). We present future directions such as developing more competitive rule-based and anytime MAPF algorithms and parallelizing state-of-the-art MAPF algorithms. The second challenge is to alleviate congestion and the effect of myopic behaviors in LMAPF algorithms. We present future directions, such as developing moving guidance and traffic rules to reduce congestion, incorporating future prediction and real-time search, and determining the optimal agent number. The third challenge is to bridge the gaps between the LMAPF models used in the literature and real-world applications. We present future directions, such as dealing with more realistic kinodynamic models, execution uncertainty, and evolving systems.
@inproceedings{ JiangSoCS24,
author = "He Jiang and Yulun Zhang and Rishi Veerapaneni and Jiaoyang Li",
title = "Scaling Lifelong Multi-Agent Path Finding to More Realistic Settings: Research Challenges and Opportunities",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "234-242",
year = "2024",
doi = "10.1609/socs.v17i1.31565",
}
Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality.
Multi-Robot-Arm Motion Planning (M-RAMP) is a challenging problem featuring complex single-agent planning and multi-agent coordination. Recent advancements in extending the popular Conflict-Based Search (CBS) algorithm have made large strides in solving Multi-Agent Path Finding (MAPF) problems. However, fundamental challenges remain in applying CBS to M-RAMP. A core challenge is the existing reliance of the CBS framework on conservative “complete” constraints. These constraints ensure solution guarantees but often result in slow pruning of the search space – causing repeated expensive single-agent planning calls. Therefore, even though it is possible to leverage domain knowledge and design incomplete M-RAMP-specific CBS constraints to more efficiently prune the search, using these constraints would render the algorithm itself incomplete. This forces practitioners to choose between efficiency and completeness. In light of these challenges, we propose a novel algorithm, Generalized ECBS, aimed at removing the burden of choice between completeness and efficiency in MAPF algorithms. Our approach enables the use of arbitrary constraints in conflict-based algorithms while preserving completeness and bounding sub-optimality. This enables practitioners to capitalize on the benefits of arbitrary constraints and opens a new space for constraint design in MAPF that has not been explored. We provide a theoretical analysis of our algorithms,propose new “incomplete” constraints, and demonstrate their effectiveness through experiments in M-RAMP.
@inproceedings{ ShaoulSoCS24,
author = "Yorai Shaoul and Rishi Veerapaneni and Maxim Likhachev and Jiaoyang Li",
title = "Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "109--117",
year = "2024",
doi = "10.1609/socs.v17i1.31548",
}ITA-ECBS: A Bounded-Suboptimal Algorithm for The Combined Target-Assignment and Path-Finding Problem.
@inproceedings{ TangSoCS24,
author = "Yimin Tang and Sven Koenig and Jiaoyang Li",
title = "ITA-ECBS: A Bounded-Suboptimal Algorithm for The Combined Target-Assignment and Path-Finding Problem",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "134-142",
year = "2024",
doi = "10.1609/socs.v17i1.31551",
}A Real-Time Rescheduling Algorithm for Multi-robot Plan Execution.
@inproceedings{ FengICAPS24,
author = "Ying Feng and Adittyo Paul and Zhe Chen and Jiaoyang Li",
title = "A Real-Time Rescheduling Algorithm for Multi-robot Plan Execution",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "201-209",
year = "2024",
doi = "10.1609/icaps.v34i1.31477",
}MAPF in 3D Warehouses: Dataset and Analysis.
@inproceedings{ WangICAPS24mapf3d,
author = "Qian Wang and Rishi Veerapaneni and Yu Wu and Jiaoyang Li and Maxim Likhachev",
title = "MAPF in 3D Warehouses: Dataset and Analysis",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "623-632",
year = "2024",
doi = "10.1609/icaps.v34i1.31525",
}Improving Learnt Local MAPF Policies with Heuristic Search.
@inproceedings{ VeerapaneniICAPS24,
author = "Rishi Veerapaneni and Qian Wang and Kevin Ren and Arthur Jakobsson and Jiaoyang Li and Maxim Likhachev",
title = "Improving Learnt Local MAPF Policies with Heuristic Search",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "597-606",
year = "2024",
doi = "10.1609/icaps.v34i1.31522",
}
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences. (Best Student Paper)
An exciting frontier in robotic manipulation is the use of multiple arms at once. However, planning concurrent motions is a challenging task using current methods. The high-dimensional composite state space renders many well-known motion planning algorithms intractable. Recently, Multi-Agent Path-Finding (MAPF) algorithms have shown promise in discrete 2D domains, providing rigorous guarantees. However, widely used conflict-based methods in MAPF assume an efficient single-agent motion planner. This poses challenges in adapting them to manipulation cases where this assumption does not hold, due to the high dimensionality of configuration spaces and the computational bottlenecks associated with collision checking. To this end, we propose an approach for accelerating conflict-based search algorithms by leveraging their repetitive and incremental nature – making them tractable for use in complex scenarios involving multi-arm coordination in obstacle-laden environments. We show that our method preserves completeness and bounded sub-optimality guarantees, and demonstrate its practical efficacy through a set of experiments with up to 10 robotic arms.
@inproceedings{ ShaoulICAPS24,
author = "Yorai Shaoul and Itamar Mishani and Maxim Likhachev and Jiaoyang Li",
title = "Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "523-531",
year = "2024",
doi = "10.1609/icaps.v34i1.31513",
}Efficient Approximate Search for Multi-Objective Multi-Agent Path Finding.
@inproceedings{ WangICAPS24momapf,
author = "Fangji Wang and Han Zhang and Sven Koenig and Jiaoyang Li",
title = "Efficient Approximate Search for Multi-Objective Multi-Agent Path Finding",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "613-622",
year = "2024",
doi = "10.1609/icaps.v34i1.31524",
}
Multi-Agent Motion Planning With Bézier Curve Optimization Under Kinodynamic Constraints.
Multi-Agent Motion Planning (MAMP) is a problem that seeks collision-free dynamically-feasible trajectories for multiple moving agents in a known environment while minimizing their travel time. MAMP is closely related to the well-studied Multi-Agent Path-Finding (MAPF) problem. Recently, MAPF methods have achieved great success in finding collision-free paths for a substantial number of agents. However, those methods often overlook the kinodynamic constraints of the agents, assuming instantaneous movement, which limits their practicality and realism. In this paper, we present a three-level MAPF-based planner called PSB to address the challenges posed by MAMP. PSB fully considers the kinodynamic capability of the agents and produces solutions with smooth speed profiles that can be directly executed by the controller. Empirically, we evaluate PSB within the domains of traffic intersection coordination for autonomous vehicles and obstacle-rich grid map navigation for mobile robots. PSB shows up to 49.79% improvements in solution cost compared to existing methods.
@article{ YanRAL24,
author = "Jingtian Yan and Jiaoyang Li",
title = "Multi-Agent Motion Planning With Bézier Curve Optimization Under Kinodynamic Constraints",
journal = "IEEE Robotics and Automation Letters",
volume = "9",
number = "3",
pages = "3021-3028",
year = "2024",
doi = "10.1109/LRA.2024.3363543",
}
Bidirectional Temporal Plan Graph: Enabling Switchable Passing Orders for More Efficient Multi-Agent Path Finding Plan Execution. (Oral)
@inproceedings{ SuAAAI24,
author = "Yifan Su and Rishi Veerapaneni and Jiaoyang Li",
title = "Bidirectional Temporal Plan Graph: Enabling Switchable Passing Orders for More Efficient Multi-Agent Path Finding Plan Execution",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "17559-17566",
year = "2024",
doi = "10.1609/aaai.v38i16.29706",
}Traffic Flow Optimisation for Lifelong Multi-Agent Path Finding.
@inproceedings{ ChenAAAI24,
author = "Zhe Chen and Daniel Harabor and Jiaoyang Li and Peter J. Stuckey",
title = "Traffic Flow Optimisation for Lifelong Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "20674-20682",
year = "2024",
doi = "10.1609/aaai.v38i18.30054",
}2023
Arbitrarily Scalable Environment Generators via Neural Cellular Automata.
We study the problem of generating arbitrarily large environments to improve the throughput of multi-robot systems. Prior work proposes Quality Diversity (QD) algorithms as an effective method for optimizing the environments of automated warehouses. However, these approaches optimize only relatively small environments, falling short when it comes to replicating real-world warehouse sizes. The challenge arises from the exponential increase in the search space as the environment size increases. Additionally, the previous methods have only been tested with up to 350 robots in simulations, while practical warehouses could host thousands of robots. In this paper, instead of optimizing environments, we propose to optimize Neural Cellular Automata (NCA) environment generators via QD algorithms. We train a collection of NCA generators with QD algorithms in small environments and then generate arbitrarily large environments from the generators at test time. We show that NCA environment generators maintain consistent, regularized patterns regardless of environment size, significantly enhancing the scalability of multi-robot systems in two different domains with up to 2,350 robots. Additionally, we demonstrate that our method scales a single-agent reinforcement learning policy to arbitrarily large environments with similar patterns.
@inproceedings{ ZhangNeurIPS23,
author = "Yulun Zhang and Matthew C. Fontaine and Varun Bhatt and Stefanos Nikolaidis and Jiaoyang Li",
title = "Arbitrarily Scalable Environment Generators via Neural Cellular Automata",
booktitle = "Proceedings of the Conference on Neural Information Processing Systems (NeurIPS)",
pages = "57212-57225",
year = "2023",
doi = "",
}Multi-Robot Geometric Task-and-Motion Planning for Collaborative Manipulation Tasks.
@article{ ZhangAR23,
author = "Hejia Zhang and Shao-Hung Chan and Jie Zhong and Jiaoyang Li and Peter Kolapo and Sven Koenig and Zach Agioutantis and Steven Schafrik and Stefanos Nikolaidis",
title = "Multi-Robot Geometric Task-and-Motion Planning for Collaborative Manipulation Tasks",
journal = "Autonomous Robots",
volume = "47",
number = "",
pages = "1537-1558",
year = "2023",
doi = "10.1007/s10514-023-10148-y",
}Solving Multi-Agent Target Assignment and Path Finding with a Single Constraint Tree. (Best Paper Finalist)
@inproceedings{ TangMRS23,
author = "Yimin Tang and Zhongqiang Ren and Jiaoyang Li and Katia Sycara",
title = "Solving Multi-Agent Target Assignment and Path Finding with a Single Constraint Tree",
booktitle = "Proceedings of the International Symposium on Multi-Robot and Multi-Agent Systems (MRS)",
pages = "8-14",
year = "2023",
doi = "10.1109/MRS60187.2023.10416794",
}Conflict-Tolerant and Conflict-Free Multi-Agent Meeting.
@article{ AtzmonAIJ23,
author = "Dor Atzmon and Ariel Felner and Jiaoyang Li and Shahaf Shperberg and Nathan Sturtevant and Sven Koenig",
title = "Conflict-Tolerant and Conflict-Free Multi-Agent Meeting",
journal = "Artificial Intelligence",
volume = "322",
number = "",
pages = "103950",
year = "2023",
doi = "10.1016/j.artint.2023.103950",
}
Multi-Robot Coordination and Layout Design for Automated Warehousing.
With the rapid progress in Multi-Agent Path Finding (MAPF), researchers have studied how MAPF algorithms can be deployed to coordinate hundreds of robots in large automated warehouses. While most works try to improve the throughput of such warehouses by developing better MAPF algorithms, we focus on improving the throughput by optimizing the warehouse layout. We show that, even with state-of-the-art MAPF algorithms, commonly used human-designed layouts can lead to congestion for warehouses with large numbers of robots and thus have limited scalability. We extend existing automatic scenario generation methods to optimize warehouse layouts. Results show that our optimized warehouse layouts (1) reduce traffic congestion and thus improve throughput, (2) improve the scalability of the automated warehouses by doubling the number of robots in some cases, and (3) are capable of generating layouts with user-specified diversity measures.
@inproceedings{ ZhangIJCAI23,
author = "Yulun Zhang and Matthew C. Fontaine and Varun Bhatt and Stefanos Nikolaidis and Jiaoyang Li",
title = "Multi-Robot Coordination and Layout Design for Automated Warehousing",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "5503-5511",
year = "2023",
doi = "10.24963/ijcai.2023/611",
}Exact Anytime Multi-Agent Path Finding Using Branch-and-Cut-and-Price and Large Neighborhood Search.
@inproceedings{ LamICAPS23,
author = "Edward Lam and Daniel Harabor and Peter J. Stuckey and Jiaoyang Li",
title = "Exact Anytime Multi-Agent Path Finding Using Branch-and-Cut-and-Price and Large Neighborhood Search",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "254-258",
year = "2023",
doi = "10.1609/icaps.v33i1.27202",
}Beyond Pairwise Reasoning in Multi-Agent Path Finding.
@inproceedings{ ShenICAPS23,
author = "Bojie Shen and Zhe Chen and Jiaoyang Li and Muhammad Aamir Cheema and Daniel Harabor and Peter J. Stuckey",
title = "Beyond Pairwise Reasoning in Multi-Agent Path Finding",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "384-392",
year = "2023",
doi = "10.1609/icaps.v33i1.27217",
}Binary Branching Multi-Objective Conflict-Based Search for Multi-Agent Path Finding.
@inproceedings{ RenICAPS23,
author = "Zhongqiang Ren and Jiaoyang Li and Han Zhang and Sven Koenig and Sivakumar Rathinam and Howie Choset",
title = "Binary Branching Multi-Objective Conflict-Based Search for Multi-Agent Path Finding",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "361-369",
year = "2023",
doi = "10.1609/icaps.v33i1.27214",
}Cost Splitting for Multi-Objective Conflict-Based Search.
@inproceedings{ GeICAPS23,
author = "Cheng Ge and Han Zhang and Jiaoyang Li and Sven Koenig",
title = "Cost Splitting for Multi-Objective Conflict-Based Search",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "128-137",
year = "2023",
doi = "10.1609/icaps.v33i1.27187",
}Deadline-Aware Multi-Agent Tour Planning. (Best Student Paper Honorable Mention)
@inproceedings{ HuangICAPS23,
author = "Taoan Huang and Vikas Shivashankar and Michael Caldara and Joseph Durham and Jiaoyang Li and Bistra Dilkina and Sven Koenig",
title = "Deadline-Aware Multi-Agent Tour Planning",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "189-197",
year = "2023",
doi = "10.1609/icaps.v33i1.27194",
}Intersection Coordination with Priority-Based Search for Autonomous Vehicles.
@inproceedings{ LiAAAI23,
author = "Jiaoyang Li and The Anh Hoang and Eugene Lin and Hai L. Vu and Sven Koenig",
title = "Intersection Coordination with Priority-Based Search for Autonomous Vehicles",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "11578-11585",
year = "2023",
doi = "10.1609/aaai.v37i10.26368",
}2022
Multi-Agent Path Finding with Mutex Propagation.
@article{ ZhangAIJ22,
author = "Han Zhang and Jiaoyang Li and Pavel Surynek and T. K. Satish Kumar and Sven Koenig",
title = "Multi-Agent Path Finding with Mutex Propagation",
journal = "Artificial Intelligence",
volume = "311",
number = "",
pages = "1034766",
year = "2022",
doi = "10.1016/j.artint.2022.103766",
}Multi-Goal Multi-Agent Pickup and Delivery.
@inproceedings{ XuIROS22,
author = "Qinghong Xu and Jiaoyang Li and Sven Koenig and Hang Ma",
title = "Multi-Goal Multi-Agent Pickup and Delivery",
booktitle = "Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
pages = "9964-9971",
year = "2022",
doi = "10.1109/IROS47612.2022.9981785",
}A MIP-Based Approach for Multi-Robot Geometric Task-and-Motion Planning.
@inproceedings{ ZhangCASE22,
author = "Hejia Zhang and Shao-Hung Chan and Jie Zhong and Jiaoyang Li and Sven Koenig and Stefanos Nikolaidis",
title = "A MIP-Based Approach for Multi-Robot Geometric Task-and-Motion Planning",
booktitle = "Proceedings of the IEEE International Conference on Automation Science and Engineering (CASE)",
pages = "2102-2109",
year = "2022",
doi = "10.1109/CASE49997.2022.9926661",
}Which MAPF Model Works Best for Automated Warehousing?.
@inproceedings{ VaramballySoCS22,
author = "Sumanth Varambally and Jiaoyang Li and Sven Koenig",
title = "Which MAPF Model Works Best for Automated Warehousing?",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "190-198",
year = "2022",
doi = "10.1609/socs.v15i1.21767",
}Learning a Priority Ordering for Prioritized Planning in Multi-Agent Path Finding.
@inproceedings{ ZhangSoCS22,
author = "Shuyang Zhang and Jiaoyang Li and Taoan Huang and Sven Koenig and Bistra Dilkina",
title = "Learning a Priority Ordering for Prioritized Planning in Multi-Agent Path Finding",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "208-216",
year = "2022",
doi = "10.1609/socs.v15i1.21769",
}Multi-Train Path Finding Revisited.
@inproceedings{ ChenSoCS22,
author = "Zhe Chen and Jiaoyang Li and Daniel Harabor and Peter J. Stuckey and Sven Koenig",
title = "Multi-Train Path Finding Revisited",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "38-46",
year = "2022",
doi = "10.1609/socs.v15i1.21750",
}Mutex Propagation in Multi-Agent Path Finding for Large Agents.
@inproceedings{ ZhangSoCS22mutex,
author = "Han Zhang and Yutong Li and Jiaoyang Li and T. K. Satish Kumar and Sven Koenig",
title = "Mutex Propagation in Multi-Agent Path Finding for Large Agents",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "249-253",
year = "2022",
doi = "10.1609/socs.v15i1.21776",
}Optimal and Bounded-Suboptimal Multi-Goal Task Assignment and Path Finding.
@inproceedings{ ZhongICRA22,
author = "Xinyi Zhong and Jiaoyang Li and Sven Koenig and Hang Ma",
title = "Optimal and Bounded-Suboptimal Multi-Goal Task Assignment and Path Finding",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
pages = "10731-10737",
year = "2022",
doi = "10.1109/ICRA46639.2022.9812020",
}Multi-Agent Path Finding for Precedence-Constrained Goal Sequences.
@inproceedings{ ZhangAAMAS22,
author = "Han Zhang and Jingkai Chen and Jiaoyang Li and Brian Williams and Sven Koenig",
title = "Multi-Agent Path Finding for Precedence-Constrained Goal Sequences",
booktitle = "Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS)",
pages = "1464-1472",
year = "2022",
doi = "",
}MAPF-LNS2: Fast Repairing for Multi-Agent Path Finding via Large Neighborhood Search.
@inproceedings{ LiAAAI22,
author = "Jiaoyang Li and Zhe Chen and Daniel Harabor and Peter J. Stuckey and Sven Koenig",
title = "MAPF-LNS2: Fast Repairing for Multi-Agent Path Finding via Large Neighborhood Search",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "10256-10265",
year = "2022",
doi = "10.1609/aaai.v36i9.21266",
}Anytime Multi-Agent Path Finding via Machine Learning-Guided Large Neighborhood Search.
@inproceedings{ HuangAAAI22,
author = "Taoan Huang and Jiaoyang Li and Sven Koenig and Bistra Dilkina",
title = "Anytime Multi-Agent Path Finding via Machine Learning-Guided Large Neighborhood Search",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "9368-9376",
year = "2022",
doi = "10.1609/aaai.v36i9.21168",
}Shard Systems: Scalable, Robust and Persistent Multi-Agent Path Finding with Performance Guarantees.
@inproceedings{ LeetAAAI22,
author = "Christopher Leet and Jiaoyang Li and Sven Koenig",
title = "Shard Systems: Scalable, Robust and Persistent Multi-Agent Path Finding with Performance Guarantees",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "9386-9395",
year = "2022",
doi = "10.1609/aaai.v36i9.21170",
}Flex Distribution for Bounded-Suboptimal Multi-Agent Path Finding.
@inproceedings{ ChanAAAI22,
author = "Shao-Hung Chan and Jiaoyang Li and Graeme Gange and Daniel Harabor and Peter J. Stuckey and Sven Koenig",
title = "Flex Distribution for Bounded-Suboptimal Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "9313-9322",
year = "2022",
doi = "10.1609/aaai.v36i9.21162",
}
Cooperative Task and Motion Planning for Multi-Arm Assembly Systems.
Multi-robot assembly systems are becoming increasingly appealing in manufacturing due to their ability to automatically, flexibly, and quickly construct desired structural designs. However, effectively planning for these systems in a manner that ensures each robot is simultaneously productive, and not idle, is challenging due to (1) the close proximity that the robots must operate in to manipulate the structure and (2) the inherent structural partial orderings on when each part can be installed. In this paper, we present a task and motion planning framework that jointly plans safe, low-makespan plans for a team of robots to assemble complex spatial structures. Our framework takes a hierarchical approach that, at the high level, uses Mixed-integer Linear Programs to compute an abstract plan comprised of an allocation of robots to tasks subject to precedence constraints and, at the low level, builds on a state-of-the-art algorithm for Multi-Agent Path Finding to plan collision-free robot motions that realize this abstract plan. Critical to our approach is the inclusion of certain collision constraints and movement durations during high-level planning, which better informs the search for abstract plans that are likely to be both feasible and low-makespan while keeping the search tractable. We demonstrate our planning system on several challenging assembly domains with several (sometimes heterogeneous) robots with grippers or suction plates for assembling structures with up to 23 objects involving Lego bricks, bars, plates, or irregularly shaped blocks.
@misc{ Chen22,
author = "Jingkai Chen and Jiaoyang Li and Yijiang Huang and Caelan Garrett and Dawei Sun and Chuchu Fan and Andreas Hofmann and Caitlin Mueller and Sven Koenig and Brian C. Williams",
title = "Cooperative Task and Motion Planning for Multi-Arm Assembly Systems",
year = "2022",
eprint = "arXiv:2203.02475",
}2021
Pairwise Symmetry Reasoning for Multi-Agent Path Finding Search.
@article{ LiAIJ21,
author = "Jiaoyang Li and Daniel Harabor and Peter J. Stuckey and Hang Ma and Graeme Gange and Sven Koenig",
title = "Pairwise Symmetry Reasoning for Multi-Agent Path Finding Search",
journal = "Artificial Intelligence",
volume = "301",
number = "",
pages = "103574",
year = "2021",
doi = "10.1016/j.artint.2021.103574",
}Anytime Multi-Agent Path Finding via Large Neighborhood Search.
@inproceedings{ LiIJCAI21,
author = "Jiaoyang Li and Zhe Chen and Daniel Harabor and Peter J. Stuckey and Sven Koenig",
title = "Anytime Multi-Agent Path Finding via Large Neighborhood Search",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "4127-4135",
year = "2021",
doi = "10.24963/ijcai.2021/568",
}Scalable Rail Planning and Replanning: Winning the 2020 Flatland Challenge. (Winner of the NeurIPS'20 Flatland Challenge; ICAPS Best System Demonstration Award)
@inproceedings{ LiICAPS21,
author = "Jiaoyang Li and Zhe Chen and Yi Zheng and Shao-Hung Chan and Daniel Harabor and Peter J. Stuckey and Hang Ma and Sven Koenig",
title = "Scalable Rail Planning and Replanning: Winning the 2020 Flatland Challenge",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "477-485",
year = "2021",
doi = "10.1609/icaps.v31i1.15994",
}Conflict-Based Increasing Cost Search.
@inproceedings{ WalkerICAPS21,
author = "Thayne Walker and Nathan R. Sturtevant and Ariel Felner and Han Zhang and Jiaoyang Li and T. K. Satish Kumar",
title = "Conflict-Based Increasing Cost Search",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "385-395",
year = "2021",
doi = "10.1609/icaps.v31i1.15984",
}EECBS: A Bounded-Suboptimal Search for Multi-Agent Path Finding.
@inproceedings{ LiAAAI21eecbs,
author = "Jiaoyang Li and Wheeler Ruml and Sven Koenig",
title = "EECBS: A Bounded-Suboptimal Search for Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "12353-12362",
year = "2021",
doi = "10.1609/aaai.v35i14.17466",
}Lifelong Multi-Agent Path Finding in Large-Scale Warehouses.
@inproceedings{ LiAAAI21lifelong,
author = "Jiaoyang Li and Andrew Tinka and Scott Kiesel and Joseph W. Durham and T. K. Satish Kumar and Sven Koenig",
title = "Lifelong Multi-Agent Path Finding in Large-Scale Warehouses",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "11272-11281",
year = "2021",
doi = "10.1609/aaai.v35i13.17344",
}Scalable and Safe Multi-Agent Motion Planning with Nonlinear Dynamics and Bounded Disturbances.
@inproceedings{ ChenAAAI21s2m2,
author = "Jingkai Chen and Jiaoyang Li and Chuchu Fan and Brian Williams",
title = "Scalable and Safe Multi-Agent Motion Planning with Nonlinear Dynamics and Bounded Disturbances",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "11237-11245",
year = "2021",
doi = "10.1609/aaai.v35i13.17340",
}Symmetry Breaking for k-Robust Multi-Agent Path Finding.
@inproceedings{ ChenAAAI21robust,
author = "Zhe Chen and Daniel Harabor and Jiaoyang Li and Peter J. Stuckey",
title = "Symmetry Breaking for k-Robust Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "12267-12274",
year = "2021",
doi = "10.1609/aaai.v35i14.17456",
}A Hierarchical Approach to Multi-Agent Path Finding.
@inproceedings{ZhangHPLAN21,
author = {Han Zhang and Mingze Yao and Ziang Liu and Jiaoyang Li and Lucas Terr and Shao-Hung Chan and T. K. Satish Kumar and Sven Koenig},
title = {A Hierarchical Approach to Multi-Agent Path Finding},
booktitle = {ICAPS Workshop on Hierarchical Planning (HPLAN)},
year = {2021}
}
Flatland Competition 2020: MAPF and MARL for Efficient Train Coordination on a Grid World.
@inproceedings{Laurent21,
title = {Flatland Competition 2020: MAPF and MARL for Efficient Train Coordination on a Grid World},
author = {Laurent, Florian and Schneider, Manuel and Scheller, Christian and Watson, Jeremy and Li, Jiaoyang and Chen, Zhe and Zheng, Yi and Chan, Shao-Hung and Makhnev, Konstantin and Svidchenko, Oleg and Egorov, Vladimir and Ivanov, Dmitry and Shpilman, Aleksei and Spirovska, Evgenija and Tanevski, Oliver and Nikov, Aleksandar and Grunder, Ramon and Galevski, David and Mitrovski, Jakov and Sartoretti, Guillaume and Luo, Zhiyao and Damani, Mehul and Bhattacharya, Nilabha and Agarwal, Shivam and Egli, Adrian and Nygren, Erik and Mohanty, Sharada},
booktitle = {Proceedings of the NeurIPS 2020 Competition and Demonstration Track},
pages = {275--301},
year = {2021},
volume = {133},
series = {Proceedings of Machine Learning Research},
}
Multi-Robot Routing with Time Windows: A Column Generation Approach.
Robots performing tasks in warehouses provide the first example of wide-spread adoption of autonomous vehicles in transportation and logistics. The efficiency of these operations, which can vary widely in practice, are a key factor in the success of supply chains. In this work we consider the problem of coordinating a fleet of robots performing picking operations in a warehouse so as to maximize the net profit achieved within a time period while respecting problem- and robot-specific constraints. We formulate the problem as a weighted set packing problem where the elements in consideration are items on the warehouse floor that can be picked up and delivered within specified time windows. We enforce the constraint that robots must not collide, that each item is picked up and delivered by at most one robot, and that the number of robots active at any time does not exceed the total number available. Since the set of routes is exponential in the size of the input, we attack optimization of the resulting integer linear program using column generation, where pricing amounts to solving an elementary resource-constrained shortest-path problem. We propose an efficient optimization scheme that avoids consideration of every increment within the time windows. We also propose a heuristic pricing algorithm that can efficiently solve the pricing subproblem. While this itself is an important problem, the insights gained from solving these problems effectively can lead to new advances in other time-widow constrained vehicle routing problems.
@misc{ Haghani21,
author = "Naveed Haghani and Jiaoyang Li and Sven Koenig and Gautam Kunapuli and Claudio Contardo and Amelia Regan and Julian Yarkony",
title = "Multi-Robot Routing with Time Windows: A Column Generation Approach",
year = "2021",
eprint = "arXiv:2103.08835",
}2020
Nested ECBS for Bounded-Suboptimal Multi-Agent Path Finding.
@inproceedings{ChanWoMAPF20,
author = {Shao-Hung Chan and Jiaoyang Li and Daniel Harabor and Peter J. Stuckey and Graeme Gange and Liron Cohen and Sven Koenig},
title = {Nested ECBS for Bounded-Suboptimal Multi-Agent Path Finding},
booktitle = {IJCAI Workshop on Multi-Agent Path Finding},
year = {2020}
}
Multi-Directional Heuristic Search.
@inproceedings{ AtzmonIJCAI20,
author = "Dor Atzmon and Jiaoyang Li and Ariel Felner and Eliran Nachmani and Shahaf Shperberg and Nathan Sturtevant and Sven Koenig",
title = "Multi-Directional Heuristic Search",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "4062-4068",
year = "2020",
doi = "10.24963/ijcai.2020/562",
}Iterative-Deepening Conflict-Based Search.
@inproceedings{ BoyarskiIJCAI2020,
author = "Eli Boyarski and Ariel Felner and Daniel Harabor and Peter J. Stuckey and Liron Cohen and Jiaoyang Li and Sven Koenig",
title = "Iterative-Deepening Conflict-Based Search",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "4084-4090",
year = "2020",
doi = "10.24963/ijcai.2020/565",
}New Techniques for Pairwise Symmetry Breaking in Multi-Agent Path Finding.
@inproceedings{ LiICAPS2020,
author = "Jiaoyang Li and Graeme Gange and Daniel Harabor and Peter J. Stuckey and Hang Ma and Sven Koenig",
title = "New Techniques for Pairwise Symmetry Breaking in Multi-Agent Path Finding",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "193-201",
year = "2020",
doi = "10.1609/icaps.v30i1.6661",
}Multi-Agent Path Finding with Mutex Propagation. (Outstanding Student Paper)
@inproceedings{ ZhangICAPS20,
author = "Han Zhang and Jiaoyang Li and Pavel Surynek and Sven Koenig and T. K. Satish Kumar",
title = "Multi-Agent Path Finding with Mutex Propagation",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "323-332",
year = "2020",
doi = "10.1609/icaps.v30i1.6677",
}Moving Agents in Formation in Congested Environments.
@inproceedings{ LiAAMAS20,
author = "Jiaoyang Li and Kexuan Sun and Hang Ma and Ariel Felner and T. K. Satish Kumar and Sven Koenig",
title = "Moving Agents in Formation in Congested Environments",
booktitle = "Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS)",
pages = "726-734",
year = "2020",
doi = "",
}Model AI Assignments 2020.
@inproceedings{ EAAI20,
author = "Todd W.Neller and Stephen Keeley and Michael Guerzhoy and Wolfgang Hoenig and Jiaoyang Li and Sven Koenig and Ameet Soni and Krista Thomason and Lisa Zhang and Bibin Sebatian and Cinjon Resnick and Avital Oliver and Surya Bhupatiraju and Kumar Krishna Agrawal and James Allingham and Sejong Yoon and Johnathan Chen and Tom Larsen and Marion Neumann and Narges Norouzi and Ryan Hausen and Matthew Evett",
title = "Model AI Assignments 2020",
booktitle = "Proceedings of the Symposium on Educational Advances in Artificial Intelligence (EAAI)",
pages = "13509-13511",
year = "2020",
doi = "10.1609/aaai.v34i09.7072",
}Mutex Propagation for SAT-based Multi-Agent Path Finding.
@inproceedings{ SurynekPRIMA20,
author = "Pavel Surynek and Jiaoyang Li and Han Zhang and T. K. Satish Kumar and Sven Koenig",
title = "Mutex Propagation for SAT-based Multi-Agent Path Finding",
booktitle = "Proceedings of the International Conference on Principles and Practice of Multi-Agent Systems (PRIMA)",
pages = "248-258",
year = "2020",
doi = "10.1007/978-3-030-69322-0_16",
}2019
Improved Heuristics for Conflict-Based Search for Multi-Agent Path Finding.
@inproceedings{ LiIJCAI19,
author = "Jiaoyang Li and Ariel Felner and Eli Boyarski and Hang Ma and Sven Koenig",
title = "Improved Heuristics for Conflict-Based Search for Multi-Agent Path Finding",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "442-449",
year = "2019",
doi = "10.24963/ijcai.2019/63",
}Scheduling and Airport Taxiway Path Planning under Uncertainty.
@inproceedings{ LiAIAA19,
author = "Jiaoyang Li and Han Zhang and Mimi Gong and Zi Liang and Weizi Liu and Zhongyi Tong and Liangchen Yi and Robert Morris and Corina Pasareanu and Sven Koenig",
title = "Scheduling and Airport Taxiway Path Planning under Uncertainty",
booktitle = "Proceedings of the AIAA Aviation Forum (AIAA)",
pages = "",
year = "2019",
doi = "10.2514/6.2019-2930",
}Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks.
@inproceedings{ SternSoCS19,
author = "Roni Stern and Nathan Sturtevant and Ariel Felner and Sven Koenig and Hang Ma and Thayne T. Walker and Jiaoyang Li and Dor Atzmon and Liron Cohen and T. K. Satish Kumar and Eli Boyarski and Roman Barták",
title = "Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "151-159",
year = "2019",
doi = "10.1609/socs.v10i1.18510",
}Using FastMap to Solve Graph Problems in a Euclidean Space.
@inproceedings{ LiICAPS19fastmap,
author = "Jiaoyang Li and Ariel Felner and Sven Koenig and T. K. Satish Kumar",
title = "Using FastMap to Solve Graph Problems in a Euclidean Space",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "273-278",
year = "2019",
doi = "10.1609/icaps.v29i1.3488",
}Disjoint Splitting for Multi-Agent Path Finding with Conflict-Based Search.
@inproceedings{ LiICAPS19disjoint,
author = "Jiaoyang Li and Daniel Harabor and Peter J. Stuckey and Ariel Felner and Hang Ma and Sven Koenig",
title = "Disjoint Splitting for Multi-Agent Path Finding with Conflict-Based Search",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "279-283",
year = "2019",
doi = "10.1609/icaps.v29i1.3487",
}Task and Path Planning for Multi-Agent Pickup and Delivery.
@inproceedings{ LiuAAMAS19,
author = "Minghua Liu and Hang Ma and Jiaoyang Li and Sven Koenig",
title = "Task and Path Planning for Multi-Agent Pickup and Delivery",
booktitle = "Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS)",
pages = "1152-1160",
year = "2019",
doi = "",
}Symmetry-Breaking Constraints for Grid-Based Multi-Agent Path Finding.
@inproceedings{ LiAAAI19symmetry,
author = "Jiaoyang Li and Daniel Harabor and Peter J. Stuckey and Hang Ma and Sven Koenig",
title = "Symmetry-Breaking Constraints for Grid-Based Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "6087-6095",
year = "2019",
doi = "10.1609/aaai.v33i01.33016087",
}Multi-Agent Path Finding for Large Agents.
@inproceedings{ LiAAAI19large,
author = "Jiaoyang Li and Pavel Surynek and Ariel Felner and Hang Ma and T. K. Satish Kumar and Sven Koenig",
title = "Multi-Agent Path Finding for Large Agents",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "7627-7634",
year = "2019",
doi = "10.1609/aaai.v33i01.33017627",
}Searching with Consistent Prioritization for Multi-Agent Path Finding.
@inproceedings{ MaAAAI19,
author = "Hang Ma and Daniel Harabor and Peter J. Stuckey and Jiaoyang Li and Sven Koenig",
title = "Searching with Consistent Prioritization for Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "7643-7650",
year = "2019",
doi = "10.1609/aaai.v33i01.33017643",
}2018
Multi-Agent Path Finding with Deadlines.
@inproceedings{ MaIJCAI18,
author = "Hang Ma and Glenn Wagner and Ariel Felner and Jiaoyang Li and T. K. Satish Kumar and Sven Koenig",
title = "Multi-Agent Path Finding with Deadlines",
booktitle = "Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI)",
pages = "417-423",
year = "2018",
doi = "",
}Adding Heuristics to Conflict-Based Search for Multi-Agent Path Finding.
@inproceedings{ FelnerICAPS18,
author = "Ariel Felner and Jiaoyang Li and Eli Boyarski and Hang Ma and Liron Cohen and T. K. Satish Kumar and Sven Koenig",
title = "Adding Heuristics to Conflict-Based Search for Multi-Agent Path Finding",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "83-87",
year = "2018",
doi = "10.1609/icaps.v28i1.13883",
}2017
Lifelong Multi-Agent Path Finding for Online Pickup and Delivery Tasks.
@inproceedings{ MaAAMAS17,
author = "Hang Ma and Jiaoyang Li and T. K. Satish Kumar and Sven Koenig",
title = "Lifelong Multi-Agent Path Finding for Online Pickup and Delivery Tasks",
booktitle = "Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS)",
pages = "837-845",
year = "2017",
doi = "",
}PhD Thesis
-
Efficient and Effective Techniques for Large-Scale Multi-Agent Path Finding.
(Best Dissertation Awards by ICAPS, AAMAS, and USC Viterbi School of Engineering)
Jiaoyang Li.
PhD thesis, Department of Computer Science, University of Southern California, Los Angeles (California), 2022.
[bibtex] [pdf]