From Plan to Reality: Robust Execution for Multi-Robot Systems

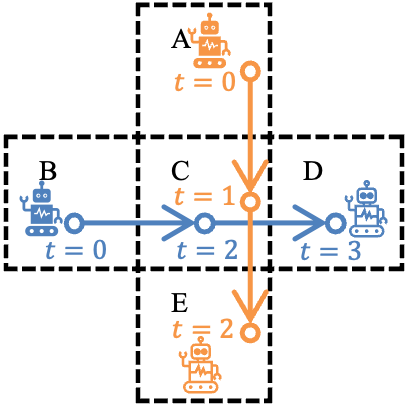
Coordinating a large team of robots for navigation tasks in a congested environment, such as automated warehouses, poses a critical challenge. While current Multi-Agent Path Finding (MAPF) solvers show promises by generating paths in seconds for hundreds of agents (simplified versions of robots) and providing important theoretical guarantees such as soundness, completeness, and even optimality, they overlook real-world constraints like robot dynamics and execution uncertainties. So naively executing them synchronously can be very inefficient (see the figure on the right).
Our goal is to bridge this gap by developing a safe and effective multi-robot path planning and execution framework. This framework aims to enable thousands of heterogeneous robots to navigate in the presence of complex obstacles, non-holonomic dynamics, actuation limits, and disturbances while minimizing travel times and communication efforts. We are currently exploring two research lines to achieve this goal: Generating MAPF plans that account for only important robot dynamics and uncertainties and developing execution frameworks to safely execute potentially imperfect MAPF plans.
MAPF Planning with Robot Dynamics
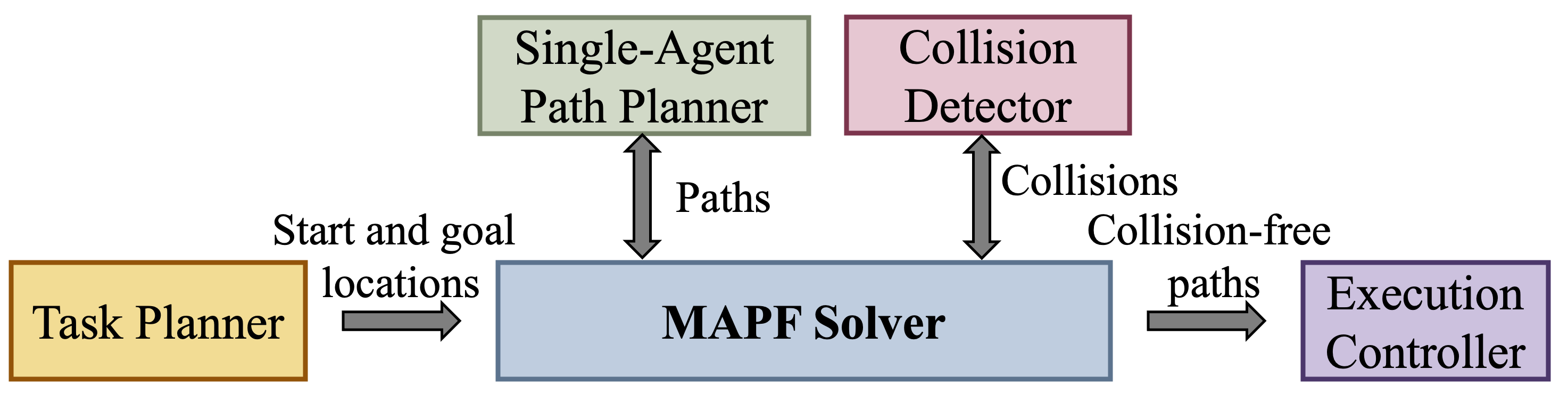
Most MAPF planners can be viewed as hierarchical frameworks, as illustrated in the figure on the right. This perspective allows us to integrate MAPF algorithms with different single-agent motion planners and collision checkers, enabling MAPF to address a broader class of Multi-Agent Motion Planning problems that incorporate robot dynamics. See more details here.
Relevant publications
Conflict-Based Search as a Protocol: A Multi-Agent Motion Planning Protocol for Heterogeneous Agents, Solvers, and Independent Tasks.
Imagine the future construction site, hospital, or office with dozens of robots bought from different manufacturers. How can we enable these different robots to effectively move in a shared environment, given that each robot may have its own independent motion planning system? This work shows how we can get efficient collision-free movements between algorithmically heterogeneous agents by using Conflict-Based Search (Sharon et al. 2015) as a protocol. At its core, the CBS Protocol requires one specific single-agent motion planning API; finding a collision-free path that satisfies certain space-time constraints. Given such an API, CBS uses a central planner to find collision-free paths - independent of how the API is implemented. We demonstrate how this protocol enables multi-agent motion planning for a heterogeneous team of agents completing independent tasks with a variety of single-agent planners including: Heuristic Search (e.g., A*), Sampling Based Search (e.g., RRT), Optimization (e.g., Direct Collocation), Diffusion, and Reinforcement Learning.
@inproceedings{ VeerapaneniICRA26,
author = "Rishi Veerapaneni and Ho Kwan Alvin Tang and Yidai Cen and Haodong He and Sophia Zhao and Viraj Shah and Ziteng Ji and Gabriel Olin and Jon Arrizabalaga and Yorai Shaoul and Jiaoyang Li and Maxim Likhachev",
title = "Conflict-Based Search as a Protocol: A Multi-Agent Motion Planning Protocol for Heterogeneous Agents, Solvers, and Independent Tasks",
booktitle = "Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)",
pages = "",
year = "2026",
doi = "",
}
Benchmarking Shortcutting Techniques for Multi-Robot-Arm Motion Planning.
Generating high-quality motion plans for multiple robot arms is challenging due to the high dimensionality of the system and the potential for inter-arm collisions. Traditional motion planning methods often produce motions that are suboptimal in terms of smoothness and execution time for multi-arm systems. Post-processing via shortcutting is a common approach to improve motion quality for efficient and smooth execution. However, in multi-arm scenarios, optimizing one arm’s motion must not introduce collisions with other arms. Although existing multi-arm planning works often use some form of shortcutting techniques, their exact methodology and impact on performance are often vaguely described. In this work, we present a comprehensive study quantitatively comparing existing shortcutting methods for multi-arm trajectories across diverse simulated scenarios. We carefully analyze the pros and cons of each shortcutting method and propose two simple strategies for combining these methods to achieve the best performance-runtime tradeoff. Video, code, and dataset are available at https://philip-huang.github.io/mr-shortcut/
@inproceedings{ HuangIROS25,
author = "Philip Huang and Yorai Shaoul and Jiaoyang Li",
title = "Benchmarking Shortcutting Techniques for Multi-Robot-Arm Motion Planning",
booktitle = "Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
pages = "13258-13265",
year = "2025",
doi = "10.1109/IROS60139.2025.11246427",
}
APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly.
Compared to a single-robot workstation, a multi-robot system offers several advantages: 1) it expands the system’s workspace, 2) improves task efficiency, and, more importantly, 3) enables robots to achieve significantly more complex and dexterous tasks, such as cooperative assembly. However, coordinating the tasks and motions of multiple robots is challenging due to issues, e.g., system uncertainty, task efficiency, algorithm scalability, and safety concerns. To address these challenges, this paper studies multi-robot coordination and proposes APEX-MR, an asynchronous planning and execution framework designed to safely and efficiently coordinate multiple robots to achieve cooperative assembly, e.g., LEGO assembly. In particular, APEX-MR provides a systematic approach to post-process multi-robot tasks and motion plans to enable robust asynchronous execution under uncertainty. Experimental results demonstrate that APEX-MR can significantly speed up the execution time of many long-horizon LEGO assembly tasks by 48% compared to sequential planning and 36% compared to synchronous planning on average. To further demonstrate performance, we deploy APEX-MR in a dual-arm system to perform physical LEGO assembly. To our knowledge, this is the first robotic system capable of performing customized LEGO assembly using commercial LEGO bricks. The experimental results demonstrate that the dual-arm system, with APEX-MR, can safely coordinate robot motions, efficiently collaborate, and construct complex LEGO structures.
@inproceedings{ HuangRSS25,
author = "Philip Huang and Ruixuan Liu and Shobhit Aggarwal and Changliu Liu and Jiaoyang Li",
title = "APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly",
booktitle = "Proceedings of the Robotics: Science and Systems (RSS)",
pages = "",
year = "2025",
doi = "10.15607/RSS.2025.XXI.098",
}
Multi-Robot Motion Planning with Diffusion Models. (Spotlight)
Diffusion models have recently been successfully applied to a wide range of robotics applications for learning complex multi-modal behaviors from data. However, prior works have mostly been confined to single-robot and small-scale environments due to the high sample complexity of learning multi-robot diffusion models. In this paper, we propose a method for generating collision-free multi-robot trajectories that conform to underlying data distributions while using only single-robot data. Our algorithm, Multi-robot Multi-model planning Diffusion (MMD), does so by combining learned diffusion models with classical search-based techniques – generating data-driven motions under collision constraints. Scaling further, we show how to compose multiple diffusion models to plan in large environments where a single diffusion model fails to generalize well. We demonstrate the effectiveness of our approach in planning for dozens of robots in a variety of simulated scenarios motivated by logistics environments. View video demonstrations in our supplementary material, and our code at: github.com/yoraish/mmd.
@inproceedings{ ShaoulICLR25,
author = "Yorai Shaoul and Itamar Mishani and Shivam Vats and Jiaoyang Li and Maxim Likhachev",
title = "Multi-Robot Motion Planning with Diffusion Models",
booktitle = "Proceedings of the International Conference on Learning Representations (ICLR)",
pages = "",
year = "2025",
doi = "",
}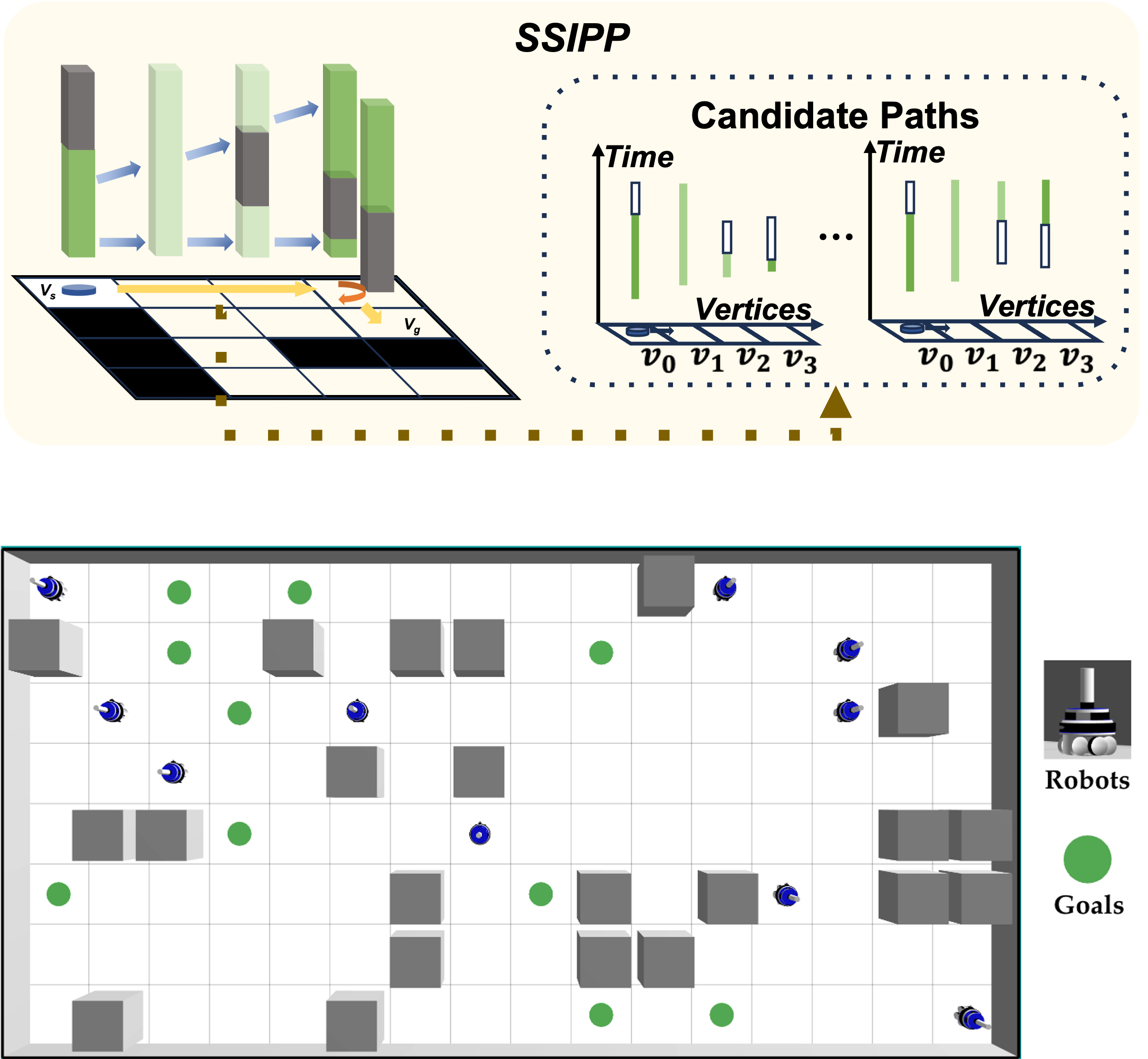
Multi-agent Motion Planning for Differential Drive Robots Through Stationary State Search.
Multi-Agent Motion Planning (MAMP) finds various applications in fields such as traffic management, airport operations, and warehouse automation. In many of these environments, differential drive robots are commonly used. These robots have a kinodynamic model that allows only in-place rotation and movement along their current orientation, subject to speed and acceleration limits. However, existing Multi-Agent Path Finding (MAPF)-based methods often use simplified models for robot kinodynamics, which limits their practicality and realism. In this paper, we introduce a three-level framework called MASS to address these challenges. MASS combines MAPF-based methods with our proposed stationary state search planner to generate high-quality kinodynamically-feasible plans. We further extend MASS using an adaptive window mechanism to address the lifelong MAMP problem. Empirically, we tested our methods on the single-shot grid map domain and the lifelong warehouse domain. Our method shows up to 400% improvements in terms of throughput compared to existing methods.
@inproceedings{ YanAAAI25,
author = "Jingtian Yan and Jiaoyang Li",
title = "Multi-agent Motion Planning for Differential Drive Robots Through Stationary State Search",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23360-23368",
year = "2025",
doi = "10.1609/aaai.v39i22.34503",
}
Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality.
Multi-Robot-Arm Motion Planning (M-RAMP) is a challenging problem featuring complex single-agent planning and multi-agent coordination. Recent advancements in extending the popular Conflict-Based Search (CBS) algorithm have made large strides in solving Multi-Agent Path Finding (MAPF) problems. However, fundamental challenges remain in applying CBS to M-RAMP. A core challenge is the existing reliance of the CBS framework on conservative “complete” constraints. These constraints ensure solution guarantees but often result in slow pruning of the search space – causing repeated expensive single-agent planning calls. Therefore, even though it is possible to leverage domain knowledge and design incomplete M-RAMP-specific CBS constraints to more efficiently prune the search, using these constraints would render the algorithm itself incomplete. This forces practitioners to choose between efficiency and completeness. In light of these challenges, we propose a novel algorithm, Generalized ECBS, aimed at removing the burden of choice between completeness and efficiency in MAPF algorithms. Our approach enables the use of arbitrary constraints in conflict-based algorithms while preserving completeness and bounding sub-optimality. This enables practitioners to capitalize on the benefits of arbitrary constraints and opens a new space for constraint design in MAPF that has not been explored. We provide a theoretical analysis of our algorithms,propose new “incomplete” constraints, and demonstrate their effectiveness through experiments in M-RAMP.
@inproceedings{ ShaoulSoCS24,
author = "Yorai Shaoul and Rishi Veerapaneni and Maxim Likhachev and Jiaoyang Li",
title = "Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "109--117",
year = "2024",
doi = "10.1609/socs.v17i1.31548",
}
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences. (Best Student Paper)
An exciting frontier in robotic manipulation is the use of multiple arms at once. However, planning concurrent motions is a challenging task using current methods. The high-dimensional composite state space renders many well-known motion planning algorithms intractable. Recently, Multi-Agent Path-Finding (MAPF) algorithms have shown promise in discrete 2D domains, providing rigorous guarantees. However, widely used conflict-based methods in MAPF assume an efficient single-agent motion planner. This poses challenges in adapting them to manipulation cases where this assumption does not hold, due to the high dimensionality of configuration spaces and the computational bottlenecks associated with collision checking. To this end, we propose an approach for accelerating conflict-based search algorithms by leveraging their repetitive and incremental nature – making them tractable for use in complex scenarios involving multi-arm coordination in obstacle-laden environments. We show that our method preserves completeness and bounded sub-optimality guarantees, and demonstrate its practical efficacy through a set of experiments with up to 10 robotic arms.
@inproceedings{ ShaoulICAPS24,
author = "Yorai Shaoul and Itamar Mishani and Maxim Likhachev and Jiaoyang Li",
title = "Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "523-531",
year = "2024",
doi = "10.1609/icaps.v34i1.31513",
}
Multi-Agent Motion Planning With Bézier Curve Optimization Under Kinodynamic Constraints.
Multi-Agent Motion Planning (MAMP) is a problem that seeks collision-free dynamically-feasible trajectories for multiple moving agents in a known environment while minimizing their travel time. MAMP is closely related to the well-studied Multi-Agent Path-Finding (MAPF) problem. Recently, MAPF methods have achieved great success in finding collision-free paths for a substantial number of agents. However, those methods often overlook the kinodynamic constraints of the agents, assuming instantaneous movement, which limits their practicality and realism. In this paper, we present a three-level MAPF-based planner called PSB to address the challenges posed by MAMP. PSB fully considers the kinodynamic capability of the agents and produces solutions with smooth speed profiles that can be directly executed by the controller. Empirically, we evaluate PSB within the domains of traffic intersection coordination for autonomous vehicles and obstacle-rich grid map navigation for mobile robots. PSB shows up to 49.79% improvements in solution cost compared to existing methods.
@article{ YanRAL24,
author = "Jingtian Yan and Jiaoyang Li",
title = "Multi-Agent Motion Planning With Bézier Curve Optimization Under Kinodynamic Constraints",
journal = "IEEE Robotics and Automation Letters",
volume = "9",
number = "3",
pages = "3021-3028",
year = "2024",
doi = "10.1109/LRA.2024.3363543",
}Intersection Coordination with Priority-Based Search for Autonomous Vehicles.
@inproceedings{ LiAAAI23,
author = "Jiaoyang Li and The Anh Hoang and Eugene Lin and Hai L. Vu and Sven Koenig",
title = "Intersection Coordination with Priority-Based Search for Autonomous Vehicles",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "11578-11585",
year = "2023",
doi = "10.1609/aaai.v37i10.26368",
}Which MAPF Model Works Best for Automated Warehousing?.
@inproceedings{ VaramballySoCS22,
author = "Sumanth Varambally and Jiaoyang Li and Sven Koenig",
title = "Which MAPF Model Works Best for Automated Warehousing?",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "190-198",
year = "2022",
doi = "10.1609/socs.v15i1.21767",
}Multi-Train Path Finding Revisited.
@inproceedings{ ChenSoCS22,
author = "Zhe Chen and Jiaoyang Li and Daniel Harabor and Peter J. Stuckey and Sven Koenig",
title = "Multi-Train Path Finding Revisited",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "38-46",
year = "2022",
doi = "10.1609/socs.v15i1.21750",
}Mutex Propagation in Multi-Agent Path Finding for Large Agents.
@inproceedings{ ZhangSoCS22mutex,
author = "Han Zhang and Yutong Li and Jiaoyang Li and T. K. Satish Kumar and Sven Koenig",
title = "Mutex Propagation in Multi-Agent Path Finding for Large Agents",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "249-253",
year = "2022",
doi = "10.1609/socs.v15i1.21776",
}
Cooperative Task and Motion Planning for Multi-Arm Assembly Systems.
Multi-robot assembly systems are becoming increasingly appealing in manufacturing due to their ability to automatically, flexibly, and quickly construct desired structural designs. However, effectively planning for these systems in a manner that ensures each robot is simultaneously productive, and not idle, is challenging due to (1) the close proximity that the robots must operate in to manipulate the structure and (2) the inherent structural partial orderings on when each part can be installed. In this paper, we present a task and motion planning framework that jointly plans safe, low-makespan plans for a team of robots to assemble complex spatial structures. Our framework takes a hierarchical approach that, at the high level, uses Mixed-integer Linear Programs to compute an abstract plan comprised of an allocation of robots to tasks subject to precedence constraints and, at the low level, builds on a state-of-the-art algorithm for Multi-Agent Path Finding to plan collision-free robot motions that realize this abstract plan. Critical to our approach is the inclusion of certain collision constraints and movement durations during high-level planning, which better informs the search for abstract plans that are likely to be both feasible and low-makespan while keeping the search tractable. We demonstrate our planning system on several challenging assembly domains with several (sometimes heterogeneous) robots with grippers or suction plates for assembling structures with up to 23 objects involving Lego bricks, bars, plates, or irregularly shaped blocks.
@misc{ Chen22,
author = "Jingkai Chen and Jiaoyang Li and Yijiang Huang and Caelan Garrett and Dawei Sun and Chuchu Fan and Andreas Hofmann and Caitlin Mueller and Sven Koenig and Brian C. Williams",
title = "Cooperative Task and Motion Planning for Multi-Arm Assembly Systems",
year = "2022",
eprint = "arXiv:2203.02475",
}Scalable and Safe Multi-Agent Motion Planning with Nonlinear Dynamics and Bounded Disturbances.
@inproceedings{ ChenAAAI21s2m2,
author = "Jingkai Chen and Jiaoyang Li and Chuchu Fan and Brian Williams",
title = "Scalable and Safe Multi-Agent Motion Planning with Nonlinear Dynamics and Bounded Disturbances",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "11237-11245",
year = "2021",
doi = "10.1609/aaai.v35i13.17340",
}Multi-Agent Path Finding for Large Agents.
@inproceedings{ LiAAAI19large,
author = "Jiaoyang Li and Pavel Surynek and Ariel Felner and Hang Ma and T. K. Satish Kumar and Sven Koenig",
title = "Multi-Agent Path Finding for Large Agents",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "7627-7634",
year = "2019",
doi = "10.1609/aaai.v33i01.33017627",
}Multi-Robot Execution and Monitoring

Due to incomplete knowledge of the world and the dynamics of robot interactions, creating perfect MAPF models is impractical. Moreover, building more accurate MAPF models will significantly reduce the scalability of the planner, as evidenced by the figure on the right.
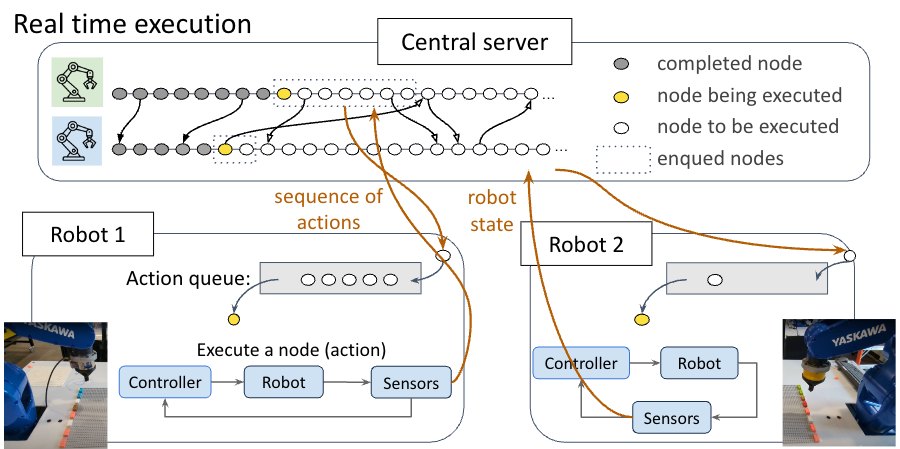
Therefore, our philosophy is to model only critical components of the robot dynamics during MAPF planning and use clever coordination and control strategies during execution to address exact robot dynamics and uncertainty. This is achieved through the use of Temporal Plan Graphs (TPGs). Given a MAPF plan, a TPG allows arbitrary modification of robot speeds as long as the order of visits to locations by different robots remains unchanged. Hence,we can implement a distributed execution policy: Each robot controls its own speed and can move to its next location only if all preceding robots have already visited it. This approach ensures robustness to imperfect MAPF models and accommodates various unexpected events, such as deviations in robot speeds due to actuator errors and breakdowns.
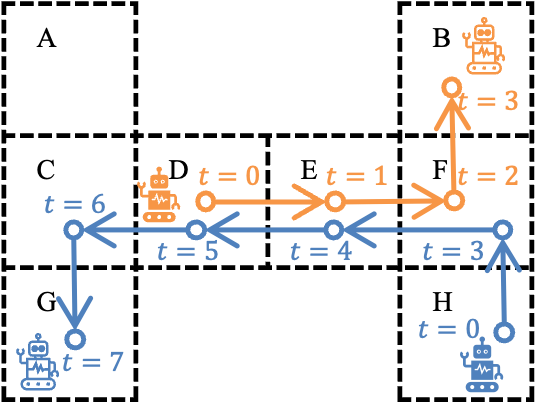

A TPG has two important properties:
- Its execution ensures collision-free movement if passing orders are specified at all potential colliding locations; and
- its execution ensures deadlock-free movement if the TPG graph is cycle-free.
Consequently, constructing and optimizing TPGs can be effectively abstracted as some graph problems. For example, we can dynamically re-optimize the passing order at every location based on the current robot progress by searching for acyclic TPGs that lead to better execution time. We can also preprocess the TPG graph by identifying noncritical passing orders, whose modification will not lead to deadlocks. Moreover, this execution framework can be applied to various robotic systems, such as mobile robots as well as robotic arms.
Relevant publications
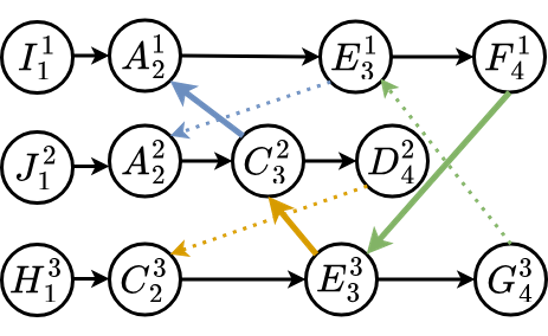
BTPG-max: Achieving Local Maximal Bidirectional Pairs for Bidirectional Temporal Plan Graphs. (Oral)
Multi-Agent Path Finding (MAPF) requires computing collision-free paths for multiple agents in a shared environment. Most MAPF planners assume that each agent reaches a specific location at a specific timestep, but this is infeasible to directly follow on real systems where delays often occur. To address collisions caused by agents deviating due to delays, the Temporal Plan Graph (TPG) was proposed, which converts a MAPF time-dependent solution into a timeindependent solution with a set of inter-agent dependencies. Recently, a Bidirectional TPG (BTPG) was proposed which relaxed some dependencies into “bidirectional pairs” and improved efficiency of agents executing their MAPF solution with delays. Our work improves upon this prior work by designing an algorithm, BPTG-max, that finds more bidirectional pairs. Our main theoretical contribution is in designing the BTPG-max algorithm that is locally maximal, i.e., it constructs a BTPG where no additional bidirectional pairs can be added. We also show how, in practice, BTPG-max leads to BTPGs with significantly more bidirectional edges, superior anytime behavior, and improved robustness to delays.
@inproceedings{ SuAAAI26,
author = "Yifan Su and Rishi Veerapaneni and Jiaoyang Li",
title = "BTPG-max: Achieving Local Maximal Bidirectional Pairs for Bidirectional Temporal Plan Graphs",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "29687-29695",
year = "2026",
doi = "10.1609/aaai.v40i35.40213",
}APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly.
Compared to a single-robot workstation, a multi-robot system offers several advantages: 1) it expands the system’s workspace, 2) improves task efficiency, and, more importantly, 3) enables robots to achieve significantly more complex and dexterous tasks, such as cooperative assembly. However, coordinating the tasks and motions of multiple robots is challenging due to issues, e.g., system uncertainty, task efficiency, algorithm scalability, and safety concerns. To address these challenges, this paper studies multi-robot coordination and proposes APEX-MR, an asynchronous planning and execution framework designed to safely and efficiently coordinate multiple robots to achieve cooperative assembly, e.g., LEGO assembly. In particular, APEX-MR provides a systematic approach to post-process multi-robot tasks and motion plans to enable robust asynchronous execution under uncertainty. Experimental results demonstrate that APEX-MR can significantly speed up the execution time of many long-horizon LEGO assembly tasks by 48% compared to sequential planning and 36% compared to synchronous planning on average. To further demonstrate performance, we deploy APEX-MR in a dual-arm system to perform physical LEGO assembly. To our knowledge, this is the first robotic system capable of performing customized LEGO assembly using commercial LEGO bricks. The experimental results demonstrate that the dual-arm system, with APEX-MR, can safely coordinate robot motions, efficiently collaborate, and construct complex LEGO structures.
@inproceedings{ HuangRSS25,
author = "Philip Huang and Ruixuan Liu and Shobhit Aggarwal and Changliu Liu and Jiaoyang Li",
title = "APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly",
booktitle = "Proceedings of the Robotics: Science and Systems (RSS)",
pages = "",
year = "2025",
doi = "10.15607/RSS.2025.XXI.098",
}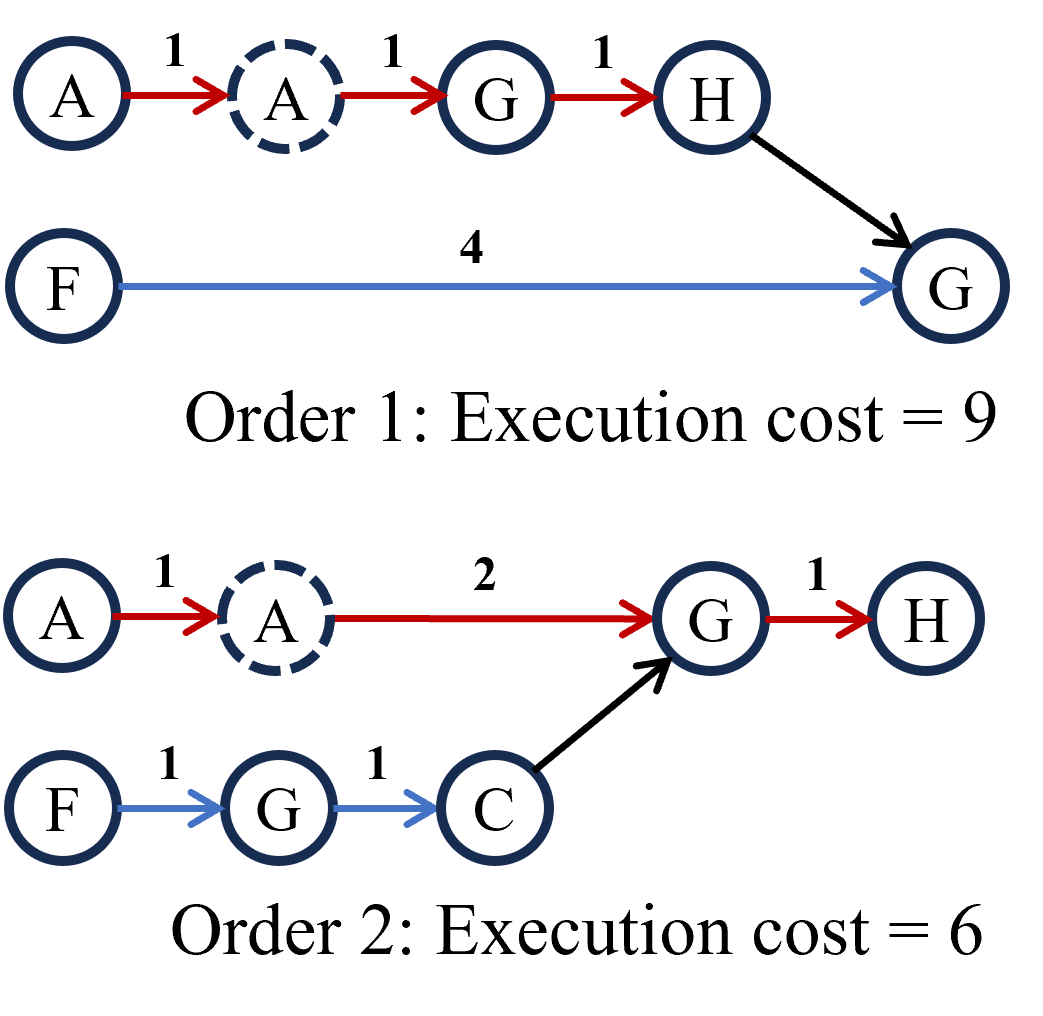
Speedup Techniques for Switchable Temporal Plan Graph Optimization. (Oral)
Multi-Agent Path Finding (MAPF) focuses on planning collision-free paths for multiple agents. However, during the execution of a MAPF plan, agents may encounter unexpected delays, which can lead to inefficiencies, deadlocks, or even collisions. To address these issues, the Switchable Temporal Plan Graph provides a framework for finding an acyclic Temporal Plan Graph with the minimum execution cost under delays, ensuring deadlock- and collision-free execution. Unfortunately, existing optimal algorithms, such as Mixed Integer Linear Programming and Graph-Based Switchable Edge Search (GSES), are often too slow for practical use. This paper introduces Improved GSES, which significantly accelerates GSES through four speedup techniques: stronger admissible heuristics, edge grouping, prioritized branching, and incremental implementation. Experiments conducted on four different map types with varying numbers of agents demonstrate that Improved GSES consistently achieves over twice the success rate of GSES and delivers up to a 30-fold speedup on instances where both methods successfully find solutions.
@inproceedings{ JiangAAAI25,
author = "He Jiang and Muhan Lin and Jiaoyang Li",
title = "Speedup Techniques for Switchable Temporal Plan Graph Optimization",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23212-23221",
year = "2025",
doi = "10.1609/aaai.v39i22.34487",
}A Real-Time Rescheduling Algorithm for Multi-robot Plan Execution.
@inproceedings{ FengICAPS24,
author = "Ying Feng and Adittyo Paul and Zhe Chen and Jiaoyang Li",
title = "A Real-Time Rescheduling Algorithm for Multi-robot Plan Execution",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "201-209",
year = "2024",
doi = "10.1609/icaps.v34i1.31477",
}
Bidirectional Temporal Plan Graph: Enabling Switchable Passing Orders for More Efficient Multi-Agent Path Finding Plan Execution. (Oral)
@inproceedings{ SuAAAI24,
author = "Yifan Su and Rishi Veerapaneni and Jiaoyang Li",
title = "Bidirectional Temporal Plan Graph: Enabling Switchable Passing Orders for More Efficient Multi-Agent Path Finding Plan Execution",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "17559-17566",
year = "2024",
doi = "10.1609/aaai.v38i16.29706",
}