Planning for Complex Robot Teams
Agents in MAPF are unrealistic and homogeneous, in the sense that each agent occupies exactly one vertex at any timestep and traverses exactly one edge or wait at its current vertex from one timestep to the next one. In the real world, however, robots might be of different shapes, have different kinematic constraints, and have different capabilities. We therefore aim to close the gap between the abstract agent models used by MAPF and the various complex robot models needed in the real world.
From 2D Gird World to General Graphs with Different Robot Kinematics
The agents in MAPF navigate on a general graph, which gives us the flexibility of applying MAPF algorithms to robots in 2D, 3D, and even higher-dimensional space, such as mobile robots, drones, and robotic arms. The challenge is how to build such graphs and handle agents with different kinematics.
Relevant publications
Multi-Train Path Finding Revisited.
@inproceedings{ ChenSoCS22,
author = "Zhe Chen and Jiaoyang Li and Daniel Harabor and Peter J. Stuckey and Sven Koenig",
title = "Multi-Train Path Finding Revisited",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "38-46",
year = "2022",
doi = "10.1609/socs.v15i1.21750",
}
Cooperative Task and Motion Planning for Multi-Arm Assembly Systems.
Multi-robot assembly systems are becoming increasingly appealing in manufacturing due to their ability to automatically, flexibly, and quickly construct desired structural designs. However, effectively planning for these systems in a manner that ensures each robot is simultaneously productive, and not idle, is challenging due to (1) the close proximity that the robots must operate in to manipulate the structure and (2) the inherent structural partial orderings on when each part can be installed. In this paper, we present a task and motion planning framework that jointly plans safe, low-makespan plans for a team of robots to assemble complex spatial structures. Our framework takes a hierarchical approach that, at the high level, uses Mixed-integer Linear Programs to compute an abstract plan comprised of an allocation of robots to tasks subject to precedence constraints and, at the low level, builds on a state-of-the-art algorithm for Multi-Agent Path Finding to plan collision-free robot motions that realize this abstract plan. Critical to our approach is the inclusion of certain collision constraints and movement durations during high-level planning, which better informs the search for abstract plans that are likely to be both feasible and low-makespan while keeping the search tractable. We demonstrate our planning system on several challenging assembly domains with several (sometimes heterogeneous) robots with grippers or suction plates for assembling structures with up to 23 objects involving Lego bricks, bars, plates, or irregularly shaped blocks.
@misc{ Chen22,
author = "Jingkai Chen and Jiaoyang Li and Yijiang Huang and Caelan Garrett and Dawei Sun and Chuchu Fan and Andreas Hofmann and Caitlin Mueller and Sven Koenig and Brian C. Williams",
title = "Cooperative Task and Motion Planning for Multi-Arm Assembly Systems",
year = "2022",
eprint = "arXiv:2203.02475",
}Symmetry Breaking for k-Robust Multi-Agent Path Finding.
@inproceedings{ ChenAAAI21robust,
author = "Zhe Chen and Daniel Harabor and Jiaoyang Li and Peter J. Stuckey",
title = "Symmetry Breaking for k-Robust Multi-Agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "12267-12274",
year = "2021",
doi = "10.1609/aaai.v35i14.17456",
}Multi-Agent Path Finding for Large Agents.
@inproceedings{ LiAAAI19large,
author = "Jiaoyang Li and Pavel Surynek and Ariel Felner and Hang Ma and T. K. Satish Kumar and Sven Koenig",
title = "Multi-Agent Path Finding for Large Agents",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "7627-7634",
year = "2019",
doi = "10.1609/aaai.v33i01.33017627",
}From MAPF to Multi-Robot Motion Planning
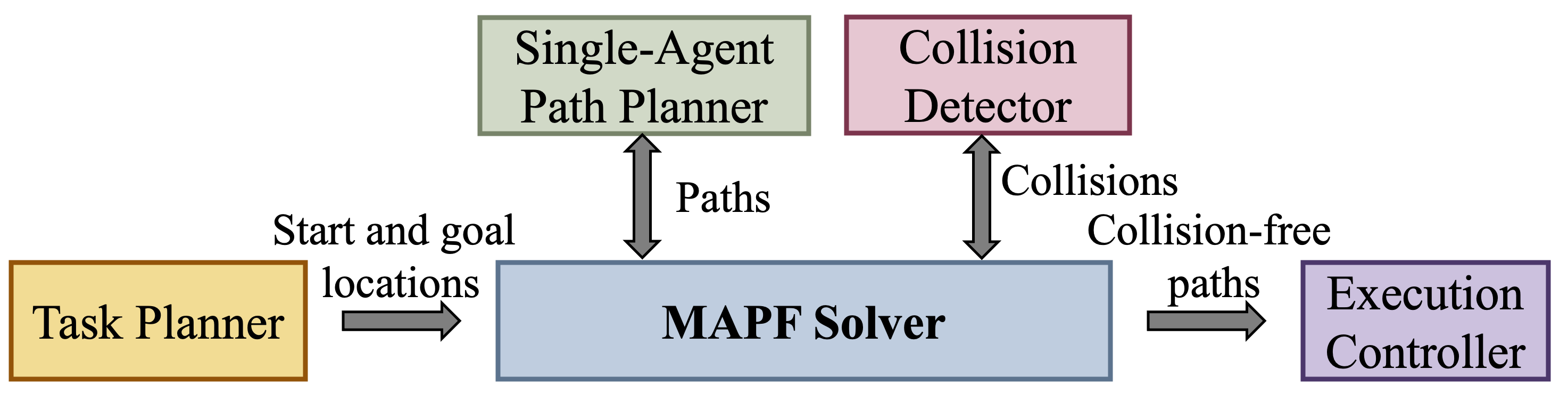 Beyond directly reasoning over MAPF graphs in different spaces for various applications,
most MAPF planners can be viewed as hierarchical frameworks, as illustrated in the figure on the right.
This perspective allows us to integrate MAPF algorithms with different single-agent motion planners and collision checkers,
enabling MAPF to address a broader class of Multi-Agent Motion Planning (MAMP) problems that incorporate robot dynamics.
Beyond directly reasoning over MAPF graphs in different spaces for various applications,
most MAPF planners can be viewed as hierarchical frameworks, as illustrated in the figure on the right.
This perspective allows us to integrate MAPF algorithms with different single-agent motion planners and collision checkers,
enabling MAPF to address a broader class of Multi-Agent Motion Planning (MAMP) problems that incorporate robot dynamics.
We have developed MAPF-based MAMP planners that rely on the following types of single-agent planners:
- Sampling-based
- Optimization-based
- Diffusion-based
- RL-based (although, technically, this is not necessarily for motion planning)
Relevant publications
Multi-Robot Motion Planning with Diffusion Models. (Spotlight)
Diffusion models have recently been successfully applied to a wide range of robotics applications for learning complex multi-modal behaviors from data. However, prior works have mostly been confined to single-robot and small-scale environments due to the high sample complexity of learning multi-robot diffusion models. In this paper, we propose a method for generating collision-free multi-robot trajectories that conform to underlying data distributions while using only single-robot data. Our algorithm, Multi-robot Multi-model planning Diffusion (MMD), does so by combining learned diffusion models with classical search-based techniques – generating data-driven motions under collision constraints. Scaling further, we show how to compose multiple diffusion models to plan in large environments where a single diffusion model fails to generalize well. We demonstrate the effectiveness of our approach in planning for dozens of robots in a variety of simulated scenarios motivated by logistics environments. View video demonstrations in our supplementary material, and our code at: github.com/yoraish/mmd.
@inproceedings{ ShaoulICLR25,
author = "Yorai Shaoul and Itamar Mishani and Shivam Vats and Jiaoyang Li and Maxim Likhachev",
title = "Multi-Robot Motion Planning with Diffusion Models",
booktitle = "Proceedings of the International Conference on Learning Representations (ICLR)",
pages = "",
year = "2025",
doi = "",
}LNS2+RL: Combining Multi-agent Reinforcement Learning with Large Neighborhood Search in Multi-agent Path Finding. (Oral)
@inproceedings{ WangAAAI25,
author = "Yutong Wang and Tanishq Duhan and Jiaoyang Li and Guillaume Adrien Sartoretti",
title = "LNS2+RL: Combining Multi-agent Reinforcement Learning with Large Neighborhood Search in Multi-agent Path Finding",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23343-23350",
year = "2025",
doi = "10.1609/aaai.v39i22.34501",
}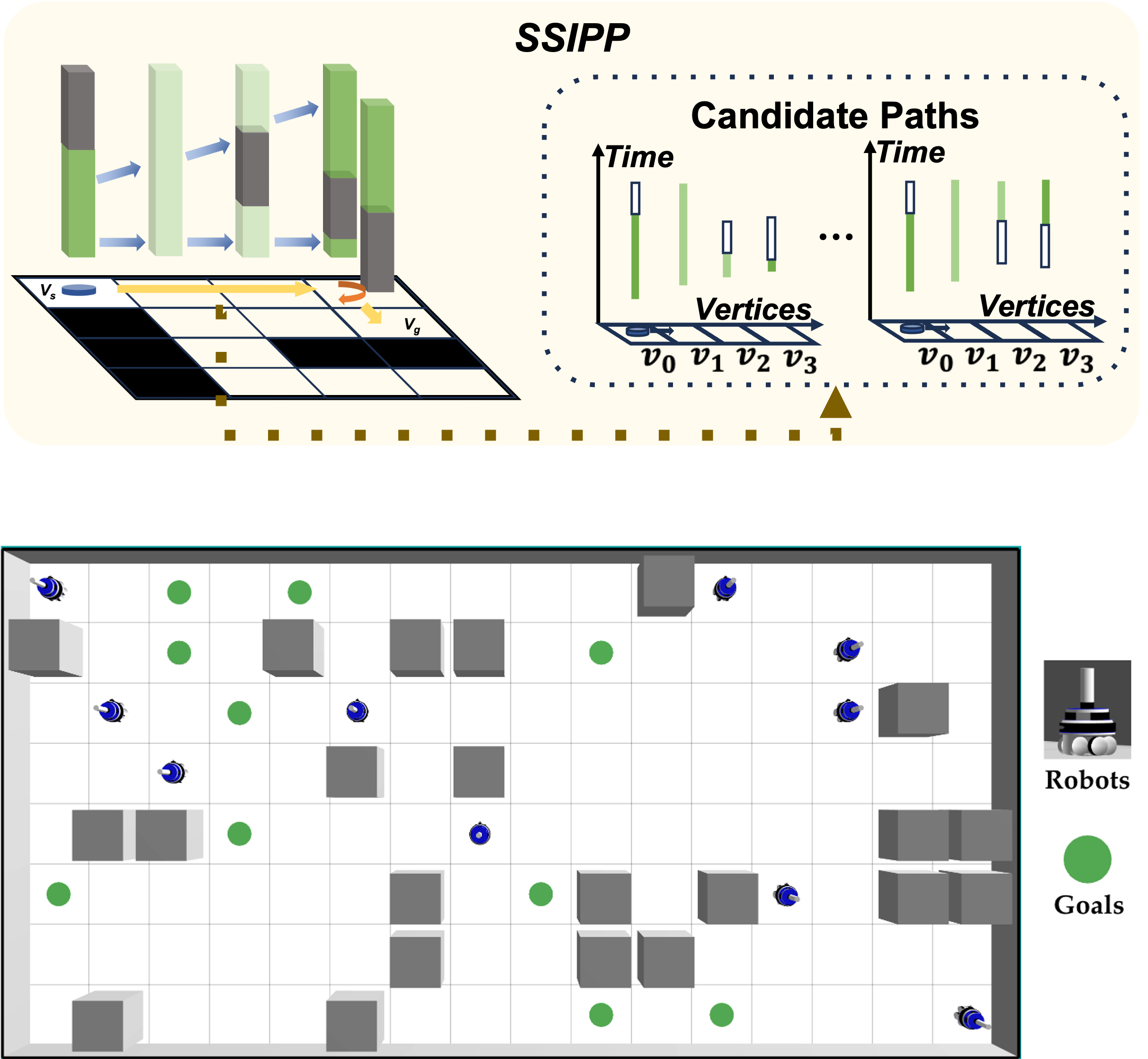
Multi-agent Motion Planning for Differential Drive Robots Through Stationary State Search.
Multi-Agent Motion Planning (MAMP) finds various applications in fields such as traffic management, airport operations, and warehouse automation. In many of these environments, differential drive robots are commonly used. These robots have a kinodynamic model that allows only in-place rotation and movement along their current orientation, subject to speed and acceleration limits. However, existing Multi-Agent Path Finding (MAPF)-based methods often use simplified models for robot kinodynamics, which limits their practicality and realism. In this paper, we introduce a three-level framework called MASS to address these challenges. MASS combines MAPF-based methods with our proposed stationary state search planner to generate high-quality kinodynamically-feasible plans. We further extend MASS using an adaptive window mechanism to address the lifelong MAMP problem. Empirically, we tested our methods on the single-shot grid map domain and the lifelong warehouse domain. Our method shows up to 400% improvements in terms of throughput compared to existing methods.
@inproceedings{ YanAAAI25,
author = "Jingtian Yan and Jiaoyang Li",
title = "Multi-agent Motion Planning for Differential Drive Robots Through Stationary State Search",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "23360-23368",
year = "2025",
doi = "10.1609/aaai.v39i22.34503",
}
Multi-Agent Motion Planning With Bézier Curve Optimization Under Kinodynamic Constraints.
Multi-Agent Motion Planning (MAMP) is a problem that seeks collision-free dynamically-feasible trajectories for multiple moving agents in a known environment while minimizing their travel time. MAMP is closely related to the well-studied Multi-Agent Path-Finding (MAPF) problem. Recently, MAPF methods have achieved great success in finding collision-free paths for a substantial number of agents. However, those methods often overlook the kinodynamic constraints of the agents, assuming instantaneous movement, which limits their practicality and realism. In this paper, we present a three-level MAPF-based planner called PSB to address the challenges posed by MAMP. PSB fully considers the kinodynamic capability of the agents and produces solutions with smooth speed profiles that can be directly executed by the controller. Empirically, we evaluate PSB within the domains of traffic intersection coordination for autonomous vehicles and obstacle-rich grid map navigation for mobile robots. PSB shows up to 49.79% improvements in solution cost compared to existing methods.
@article{ YanRAL24,
author = "Jingtian Yan and Jiaoyang Li",
title = "Multi-Agent Motion Planning With Bézier Curve Optimization Under Kinodynamic Constraints",
journal = "IEEE Robotics and Automation Letters",
volume = "9",
number = "3",
pages = "3021-3028",
year = "2024",
doi = "10.1109/LRA.2024.3363543",
}
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences. (Best Student Paper)
An exciting frontier in robotic manipulation is the use of multiple arms at once. However, planning concurrent motions is a challenging task using current methods. The high-dimensional composite state space renders many well-known motion planning algorithms intractable. Recently, Multi-Agent Path-Finding (MAPF) algorithms have shown promise in discrete 2D domains, providing rigorous guarantees. However, widely used conflict-based methods in MAPF assume an efficient single-agent motion planner. This poses challenges in adapting them to manipulation cases where this assumption does not hold, due to the high dimensionality of configuration spaces and the computational bottlenecks associated with collision checking. To this end, we propose an approach for accelerating conflict-based search algorithms by leveraging their repetitive and incremental nature – making them tractable for use in complex scenarios involving multi-arm coordination in obstacle-laden environments. We show that our method preserves completeness and bounded sub-optimality guarantees, and demonstrate its practical efficacy through a set of experiments with up to 10 robotic arms.
@inproceedings{ ShaoulICAPS24,
author = "Yorai Shaoul and Itamar Mishani and Maxim Likhachev and Jiaoyang Li",
title = "Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
pages = "523-531",
year = "2024",
doi = "10.1609/icaps.v34i1.31513",
}
Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality.
Multi-Robot-Arm Motion Planning (M-RAMP) is a challenging problem featuring complex single-agent planning and multi-agent coordination. Recent advancements in extending the popular Conflict-Based Search (CBS) algorithm have made large strides in solving Multi-Agent Path Finding (MAPF) problems. However, fundamental challenges remain in applying CBS to M-RAMP. A core challenge is the existing reliance of the CBS framework on conservative “complete” constraints. These constraints ensure solution guarantees but often result in slow pruning of the search space – causing repeated expensive single-agent planning calls. Therefore, even though it is possible to leverage domain knowledge and design incomplete M-RAMP-specific CBS constraints to more efficiently prune the search, using these constraints would render the algorithm itself incomplete. This forces practitioners to choose between efficiency and completeness. In light of these challenges, we propose a novel algorithm, Generalized ECBS, aimed at removing the burden of choice between completeness and efficiency in MAPF algorithms. Our approach enables the use of arbitrary constraints in conflict-based algorithms while preserving completeness and bounding sub-optimality. This enables practitioners to capitalize on the benefits of arbitrary constraints and opens a new space for constraint design in MAPF that has not been explored. We provide a theoretical analysis of our algorithms,propose new “incomplete” constraints, and demonstrate their effectiveness through experiments in M-RAMP.
@inproceedings{ ShaoulSoCS24,
author = "Yorai Shaoul and Rishi Veerapaneni and Maxim Likhachev and Jiaoyang Li",
title = "Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality",
booktitle = "Proceedings of the Symposium on Combinatorial Search (SoCS)",
pages = "109--117",
year = "2024",
doi = "10.1609/socs.v17i1.31548",
}Scalable and Safe Multi-Agent Motion Planning with Nonlinear Dynamics and Bounded Disturbances.
@inproceedings{ ChenAAAI21s2m2,
author = "Jingkai Chen and Jiaoyang Li and Chuchu Fan and Brian Williams",
title = "Scalable and Safe Multi-Agent Motion Planning with Nonlinear Dynamics and Bounded Disturbances",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)",
pages = "11237-11245",
year = "2021",
doi = "10.1609/aaai.v35i13.17340",
}Moving in formation
Robots sometimes are required to move to their goal locations while maintaining a desired formation (i.e., spatial pattern), in order to reduce the system cost, increase the robustness and efficiency of the system.
Relevant publications
Moving Agents in Formation in Congested Environments.
@inproceedings{ LiAAMAS20,
author = "Jiaoyang Li and Kexuan Sun and Hang Ma and Ariel Felner and T. K. Satish Kumar and Sven Koenig",
title = "Moving Agents in Formation in Congested Environments",
booktitle = "Proceedings of the International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS)",
pages = "726-734",
year = "2020",
doi = "",
}